
章鱼,凭借其高效的神经肌肉层级结构,实现了对复杂且灵巧肢体的精准操控。这一结构整合了富含传感器的吸盘、臂内具身计算以及集中式高级推理功能,是面临机械自由度高、通信通道需求大等挑战的软体机器人设计的重要灵感来源。

受章鱼层级智能启发,此前已有研究人员尝试在软体机器人系统中模拟这种生物特性。相关研究主要采用分层架构设计,通过整合基础吸盘、软体计算元件和执行器,将感知、决策和执行功能下放至机器人末端。然而,现有方案在实现完整功能集成方面仍存在明显局限。特别是在同时实现吸力粘附、具身智能和多模态感知的层次化系统构建方面,目前尚未取得突破性进展。
▍受章鱼层级智能启发,开发新型流体驱动软体机器人系统
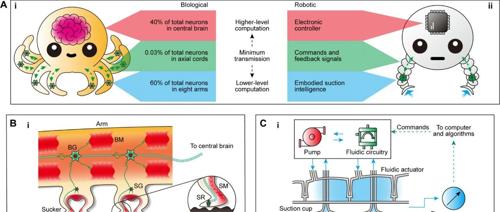
针对上述问题,来自英国布里斯托尔布里斯托尔机器人实验室和南方科技大学的研究人员前不久进行了深入研究,并从章鱼的层级智能中获取灵感,开发了一种新型流体驱动(气动或液压)软体机器人系统。该系统借鉴了章鱼神经肌肉系统的一层级结构设计思路,由中央大脑负责高级感知和决策功能,嵌入式STS(人工神经节)处理低级信号和控制指令。吸盘、压力传感器、STS 和驱动泵则分别对应章鱼的吸盘、SR、神经节和肌肉。
值得注意的是,该系统在低级自主控制实现方式上与生物原型存在差异。章鱼通过神经信号分别控制神经元和肌肉系统,而该研究采用流体流动同时实现控制(通过STS)和驱动(通过软执行器)功能。这种集成化设计更适合软体机器人应用,使其能够通过简单的非电子控制器完成复杂任务。
与现有流体驱动智能系统相比,该研究提出的分层吸盘智能架构在系统复杂度和多功能性方面表现更优。实验数据显示,该系统能够稳定抓取脆弱物体,并实现多段机器人的快速响应和顺序驱动。通过低成本、易集成的技术方案,该研究为仿生机器智能研究开辟了新途径。其开发的吸力智能模块可有效提升流体驱动软体机器人的智能水平,同时降低计算资源需求,在工业搬运、智能制造、医疗辅助等领域具有广泛应用前景。其STS的可编程特性也为开发先进智能流体执行器提供了新可能。结合分层智能系统,这一技术路线有望推动具有高级感知、分布式控制和自主行为能力的新一代软体机器人发展。
目前,该研究成果的相关论文已以“Embodying soft robots with octopus-inspired hierarchical suction intelligence”为题发表在《Science Robotics》上。

那么,该研究成果具体是如何实现的呢?接下来,和机器人大讲堂一起来深入探索~
▍开发双重策略分层处理,实现低级自主行为与多元感知交互
章鱼的智能吸盘系统具有独特的层级结构。每条腕足由多个节段组成,每个节段包含一对环绕的复杂吸盘。吸盘感受器(SR)分布在吸盘边缘,用于获取环境信息。神经纤维将吸盘神经节(SG)和臂神经节(BG)与SR、吸盘肌(SM)及臂肌(BM)相连接。其中,吸盘神经肌肉回路(SR、SG和SM)主要负责吸力控制,而臂神经回路(BG和BM)则控制腕足运动。
当受到物理刺激时,信息通过两个并行通路处理:一条通路产生局部反馈信号驱动肌肉细胞,使吸盘自动产生吸力;另一条通路将感觉信号传递至中脑进行高级感知。这种分布式处理机制降低了中枢神经系统的计算负担,提高了响应速度。
基于上述原理,研究团队开发了流体驱动(气动或液压)软体机器人系统。该系统采用硅胶吸盘模拟章鱼吸盘,软流体执行器模拟脑细胞(BM)动作驱动机械臂,吸力触发开关(STS)模拟脑源性神经元(BG)的具身化低级计算功能,压力传感器模拟感知器(SR)并通过吸力流获取环境信息,计算机和算法则负责模拟中枢大脑并做出高级决策。这种分布式嵌入式系统设计使软机器人能够以简单的结构和较低的计算成本实现吸力粘附、环境感知等功能。
-
基于吸力的具身智能策略:实现类章鱼低级自主行为
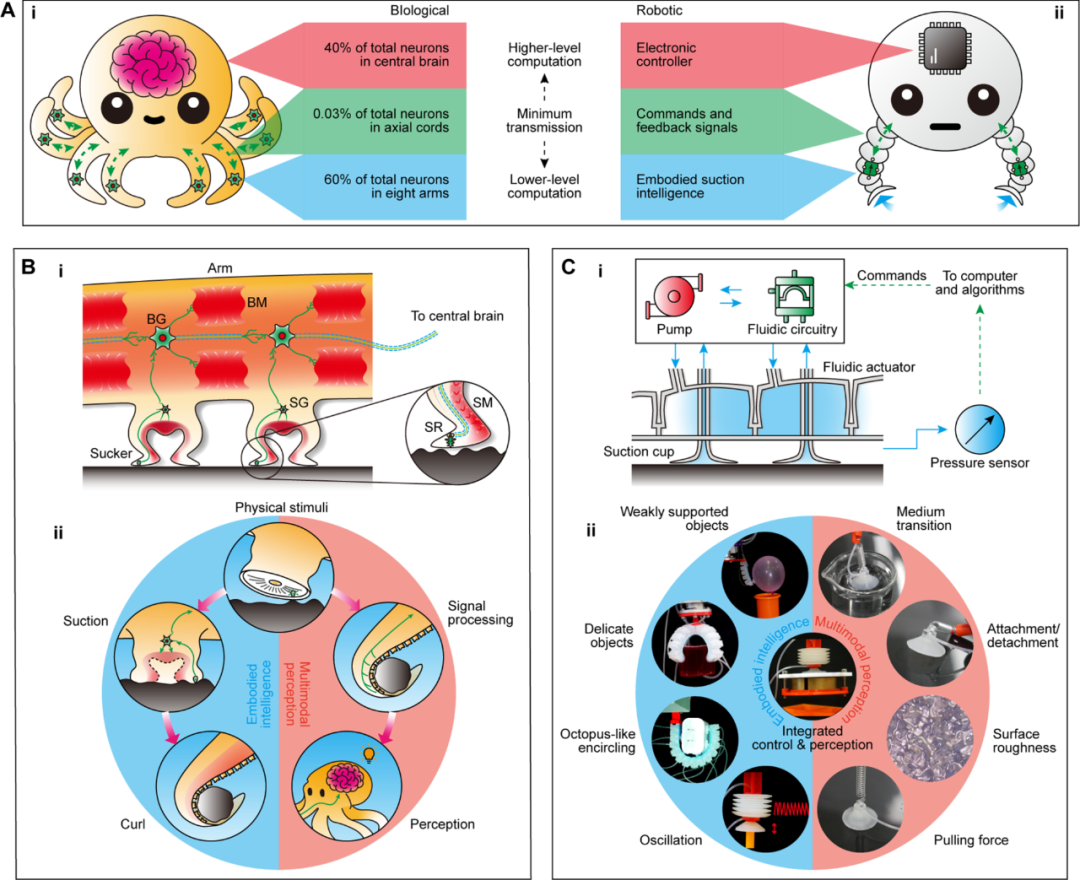
在章鱼体内,吸盘机械感受器能够将环境刺激转化为神经信号,通过局部神经节实现快速响应,并无需中枢大脑进行更高级计算。受此启发,研究团队开发了基于吸力的具身智能策略。该策略通过机器人体内感知和控制的局部集成感知与控制功能,使其能够实现类似章鱼的低级自主性,包括抓取支撑薄弱的易碎物体以及吸吮和缠绕未知物体。
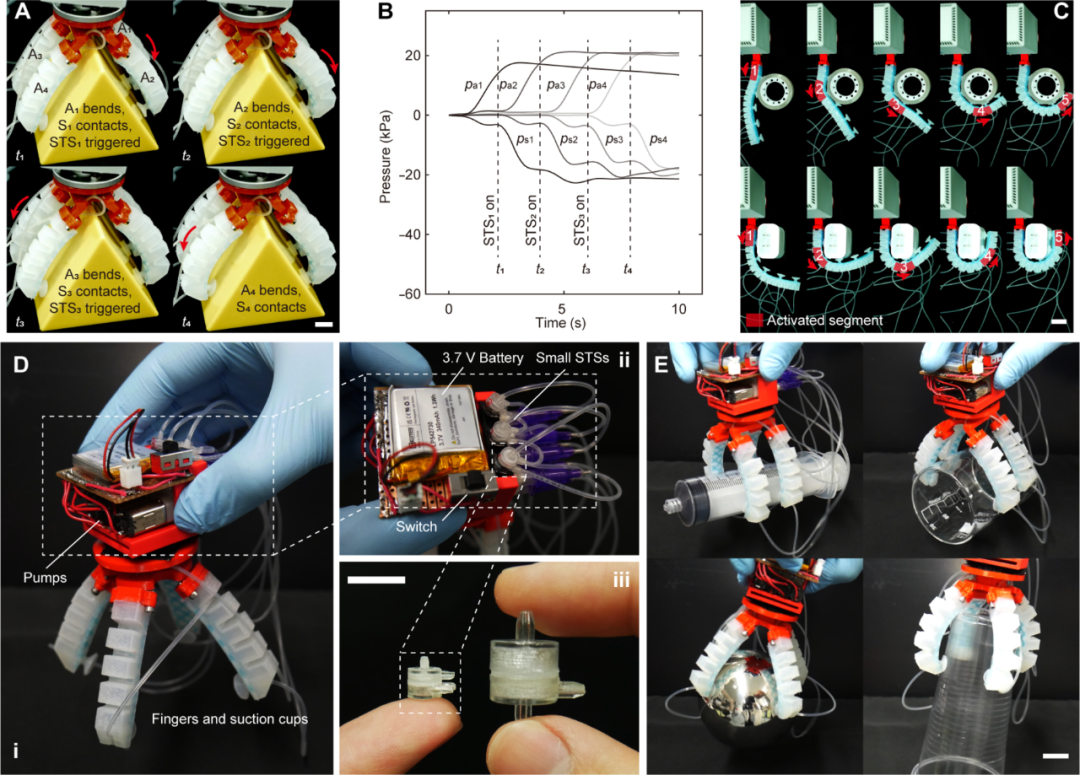
通过两类实验,研究团队验证了基于吸力的具身智能策略。在机械手配置方面,团队则开发了两种验证平台:第一种为四指机械手结构,每个独立手指配备指尖吸盘,由四个隔膜泵和三个STS模块协同控制。该设计采用多泵独立供流方案,有效避免了通道干扰问题,使系统空间布局更具灵活性。第二种为仿章鱼臂机器人,由五个独立节段构成,通过四个STS模块和五个泵实现驱动控制。该系统的泵体、电池及STS模块均可集成于紧凑的机械手内部,无需依赖外部电动控制器。同时,STS模块的模块化设计使其具备良好的系统扩展性。
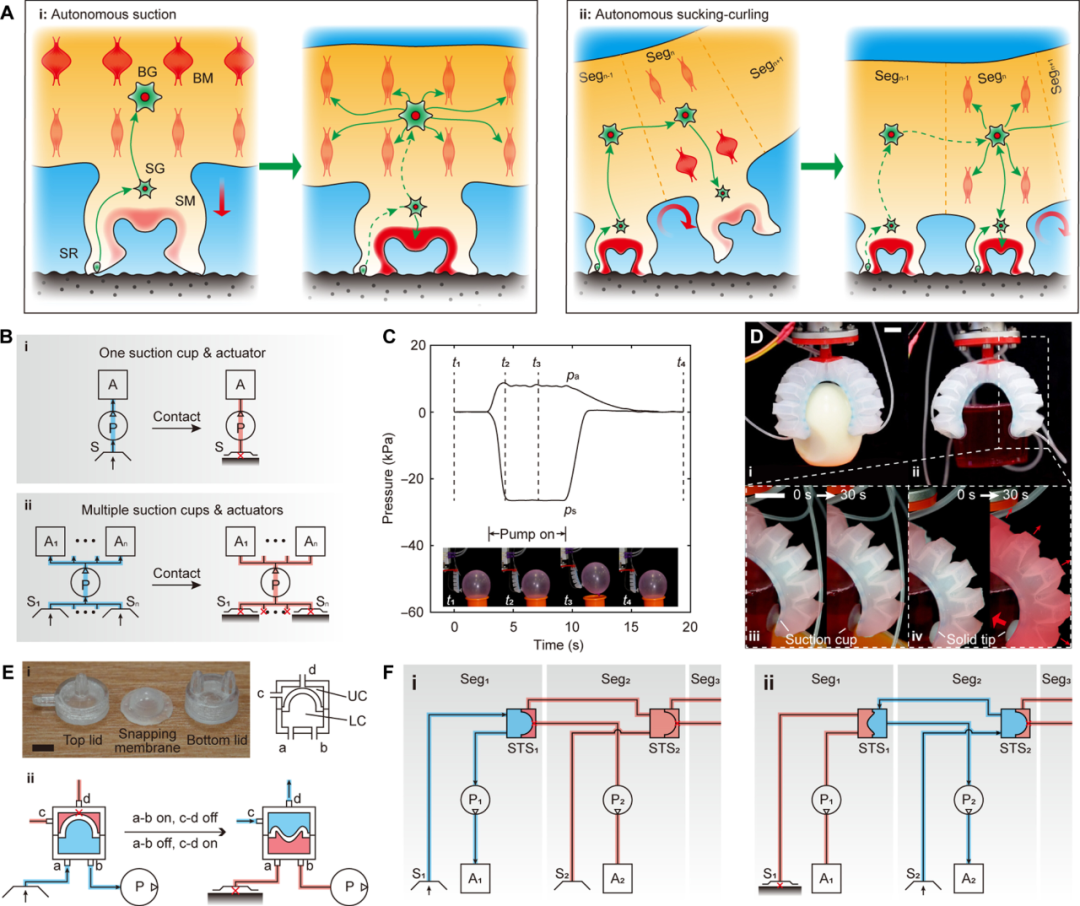
在自主吸力行为测试中,机器人系统模拟了章鱼吸盘接触物体时的神经肌肉反应机制。当吸盘接触光滑表面时,系统能在短时间内建立密封并阻断执行器充气,这一过程通过简单的流体回路实现。实验数据显示,单根软手指可轻柔抓取薄弱气球,四指机械手则能安全抓取无壳鸡蛋和易碎果冻等物体,有效避免了传统机械手因挤压力不可控造成的损伤。
在吸吮与卷曲协同行为测试中,系统通过STS模块模拟了章鱼神经节的局部计算功能。STS采用硅胶半球形弹跳膜设计,可根据压力变化自主调节流体路径。测试结果表明,四指机械手和五节段章鱼臂机器人能通过泵与STS的联动,依次触发手指弯曲或臂节卷曲动作,实现对未知形状物体的自适应环绕。值得注意的是,该系统无需电动控制器即可实现功能集成,且STS模块体积可缩小至原始尺寸的1/8。
-
基于吸力的多模态感知策略:解码环境物理量实现多元感知
章鱼吸盘与人造吸盘的感知均基于对可测量物理量的解码。章鱼的吸盘机械感受器可将细胞变形转化为神经信号并传输至中枢大脑解码,而基于流体的传感方式则通过压力传感器测量吸力流体压力,将吸盘内外压力差直接转化为反映吸盘与环境物理相互作用的电信号,为机器人感知环境提供了更简化的路径。
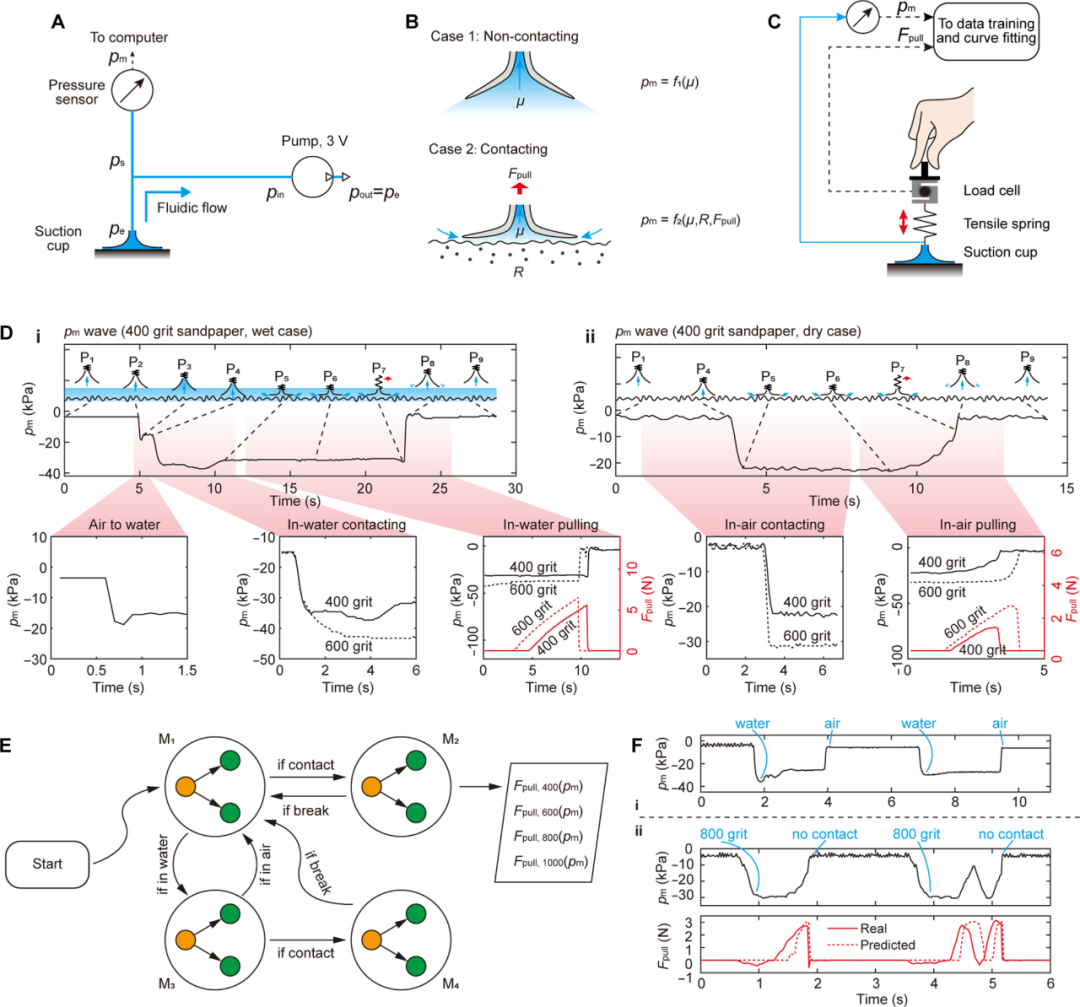
以中心带孔的吸盘为例,其典型应用场景分为两类:非接触式场景中,吸盘持续吸入环境介质,测得的压力值与环境介质粘度相关;接触表面并受拉力作用时,压力值则与环境介质粘度、接触表面粗糙度及拉力相关。基于此,研究团队开发了基于流体压力分析的多模态感知系统。该策略通过简单信号分类器,使机器人能够感知接触、流体粘度、表面粗糙度及拉力等环境条件。
通过收集不同环境介质(空气/水)、表面粗糙度(320-1000 粒度砂纸)及拉力组合下的压力信号,研究就该策略有效性进行了验证。结果显示,吸盘从空气进入水中时 pm 快速下降,接触砂纸时 pm 呈阶跃变化,干燥环境中拉力变化与 pm 相关而水中无明显关联。通过设计四个分类器(M1-M4)及曲线拟合模型,系统可实现环境介质变化、接触发生、表面粗糙度的识别及拉力趋势预测。其中,空气与水中事件分类准确率超 95%,水下表面粗糙度分类准确率约 71%,干燥环境拉力预测平均误差 27%。
▍融合双重策略于一体,实现粘附、具身智能等多重功能集成
研究团队通过整合基于吸力的具身智能与多模态感知功能,实现了单一系统的双重策略协同运行。该系统利用吸力流的能量(压力变化)与信息(压力信号),使粘附、具身智能及环境感知等功能互不干扰地集成于同一平台。
在一个简单系统中,研究团队展示了这种分层智能的运作模式。该系统由一台计算机(上级控制器)、一个STS(下级控制器)、两个泵以及一个软体夹持器组成。在工作流程上,计算机向两个泵发送供电指令后,STS会阻断泵1的抽真空流,此时泵2的充气流驱动执行器伸展。由于STS仅抑制了泵1的流量而未完全阻断泵2的充气,执行器将持续伸展至平衡位置。当吸盘接触并捕获物体(阻断泵2的充气流)后,STS切换至开启泵1的通道,使执行器缩回。此过程中产生的压力信号被传输至计算机进行感知分析。实验数据显示,该系统对物体湿度、质量及表面粗糙度的检测平均准确率超过89%。
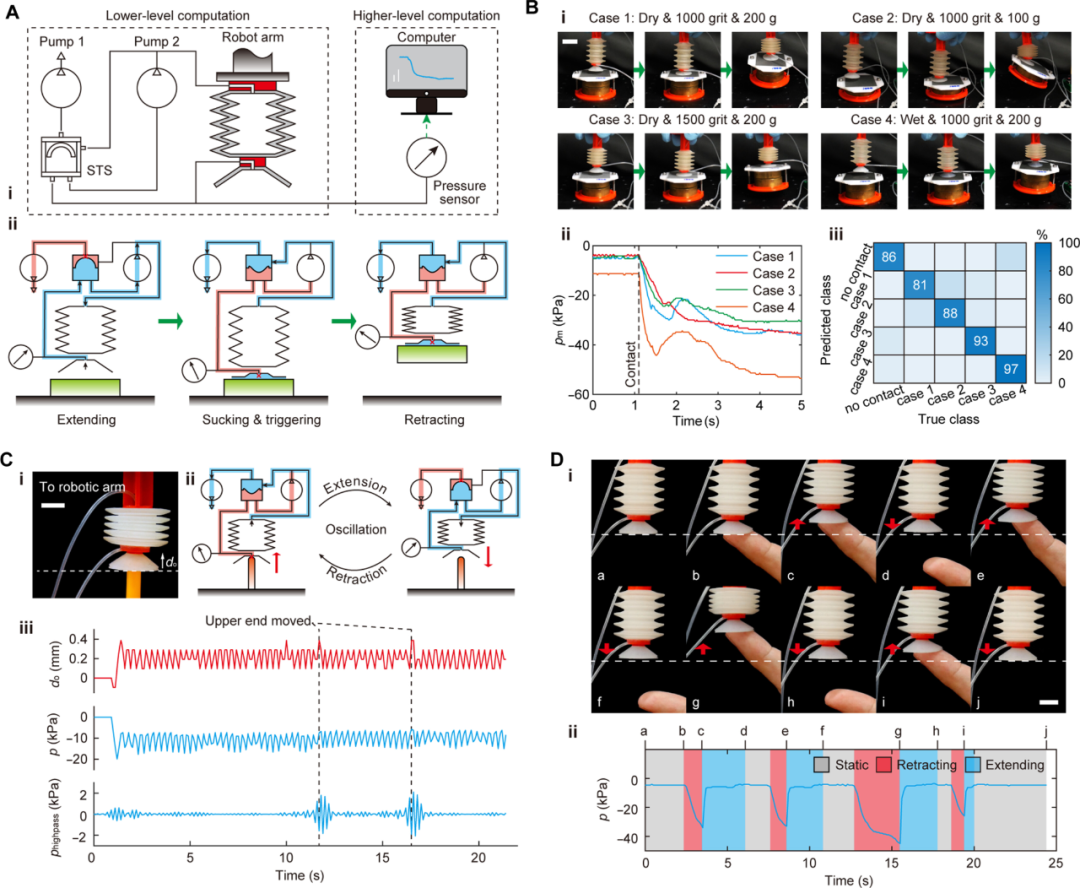
这种分层架构还催生了一些独特的动态响应特性。例如,当目标接触面积过小(实验采用直径8毫米圆头销)时,吸盘虽能触发STS却无法产生足够吸附力。这导致STS在开闭状态间反复切换,使执行器产生频率3.4Hz、振幅0.2毫米的振荡位移(3V泵驱动条件下)。值得注意的是,该振荡具有自定位特性——当机械臂移动执行器上端时,系统能自动调整长度使振荡始终维持在接触点。这一过程完全由下级控制器自主协调,无需上级干预。
同时,通过高通滤波器(标记为p_highpass)将压力信号传输至计算机处理,系统可检测执行器上端的运动状态。这些数据有助于机器人更精准地理解环境并制定决策。此外,该系统还能实现人机交互功能:轻触吸盘孔可触发执行器回缩,而移除接触后STS会重新驱动伸展至平衡位置。
研究结果表明,这种吸力驱动与感知融合的策略为软体机器人自主操作与环境交互提供了新的技术路径。
▍结语和未来
该研究成功构建了一种基于吸力的软体机器人系统,实现了具身计算、多模态感知与吸力吸附功能的集成化架构。实验表明,该系统能够在不依赖复杂集中式计算或电子控制的情况下,完成与不确定精细环境的自主交互。这一成果验证了仿生分层控制在提升软体机器人适应性与鲁棒性方面的可行性,为多功能智能机器的设计提供了新的技术思路。
当然,目前的研究也仍存在若干可改进空间。在硬件设计方面,实验采用的管路系统保留了较长的外部管段以便于演示验证,团队考虑未来将管路嵌入腔室内部以提升集成度。同时,STS模块的尺寸可通过优化卡扣结构实现进一步小型化。
在功能适应性方面,虽然现有吸盘已展现出对表面形貌的基础适应能力,但在部分极端条件下仍会出现吸附失效现象。后续研究中,团队会继续探索将高级主动控制策略与现有低级吸力智能相结合,以增强系统适应性。
参考文章:
https://www.science.org/doi/10.1126/scirobotics.adr4264#abstract
(文:机器人大讲堂)