智元机器人宣布20亿收购案,收购上纬新材63.62%股份,将借壳上市?华为前高管掌舵人终现身

智元机器人宣布收购上市公司上纬新材控股权,背后掌舵人为华为前副总裁邓泰华。公司专注于人形机器人研发,并获得腾讯等明星资本加持,估值短时间内翻倍至150亿人民币。
智元机器人宣布收购上市公司上纬新材控股权,背后掌舵人为华为前副总裁邓泰华。公司专注于人形机器人研发,并获得腾讯等明星资本加持,估值短时间内翻倍至150亿人民币。
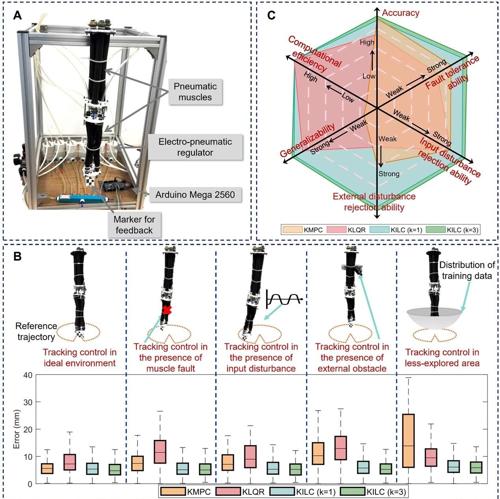
多领域具有重要应用价值。充分发挥其能力需要设计有效、高效且可靠的控制系统,而由于其结构复杂性,这一任

atGPT般越思考越聪明” ,同时对H20相关影响表示痛心“500亿中国市场对美关闭” 。尽管英伟达
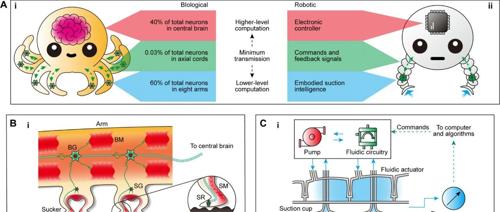
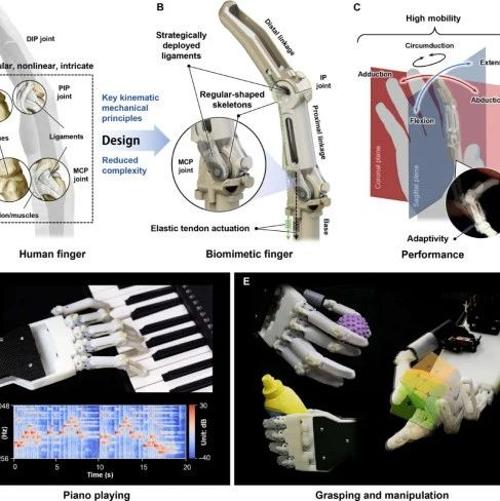
盘、臂内具身计算以及集中式高级推理功能,是面临机械自由度高、通信通道需求大等挑战的软体机器人设计的重