
轮腿式星球车,具有多构型运动能力,有效继承了传统星球车轮式构型的移动速度、能量消耗、负载能力优势,同时具备腿式构型的地形适应性和运动灵活性。也因此,多自由度轮腿混合式主动悬架星球探测车近年来逐渐成为各个国家和实验室的研究焦点。

然而,轮腿式星球车的高机动性在带来优势的同时,也带来了新的问题。它使得规划算法的复杂程度大幅增加,特别是在密集障碍环境中,规划算法需要综合考虑机器人的几何特征、运动能力以及与环境交互的特征。这对传统的路径规划方法而言,无疑是一项严峻的挑战。
▍提出新思路,融合马尔可夫决策模型与GF集理论
针对上述难题,上海交通大学何俊教授研究团队进行了深入研究,并提出了基于扩展马尔可夫决策过程的路径规划方法。该研究创新性地融合了GF集理论与构态拓扑理论,通过构建离线运动规划库以量化不同动作特征的能量消耗与风险;引入“足端运动相关节点”描述机器人与环境的交互关系;同时扩展传统马尔可夫模型至二阶性质,以解决路径转向时的碰撞问题。此外,研究团队还提出信息引导的值迭代算法,结合四叉树地图的分层存储特性,仅在与目标点强相关的方向上进行深度搜索与迭代,显著降低计算复杂度。
实验结果表明,该方法在非均匀地图中能够高效求解最优路径。在TAWL轮腿式探测车上,研究团队也验证了其鲁棒性。通过这种离线与在线规划协同的方法,实现了非结构化密集环境下平衡能耗与风险的最优路径生成,计算效率较传统算法提升显著,为高维机器人系统的自主导航提供了新思路。
前不久,该研究成果已以《Probabilistic Path Planning for Wheel-Legged Rover in Dense Environment Based on Extended MDP and Configuration Topology Analysis》为题发表于《IEEE Transactions on Robotics》期刊。上海交通大学为通讯单位,何俊教授为通讯作者;朱碧珂博士为第一作者,现为南方科技大学博士后;共同作者包括上海交通大学高峰教授和袁致成博士生。

▍基于扩展马尔可夫决策过程的路径规划方法
围绕高维多末端轮腿式机器人,研究团队展开系统性技术研究,从运动特征表达、能耗风险分析、路径规划等多个维度进行技术突破。
-
基于GF集与构态拓扑的高维多末端轮腿式机器人运动特征表达
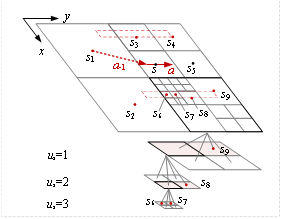
在运动特征表达方面,鉴于轮腿式机器人多构型、运动特征复杂的特性,研究团队基于GF集与构态拓扑,对高维多末端轮腿式机器人的运动特征进行描述,如图所示。具体而言,机器人能够根据所处环境的约束条件,生成连续且合理的步态,这一步态通过构态拓扑序列进行精确描述;同时,生成符合期望的足端运动特征,该特征由GF集进行清晰表示。在此基础上,结合样条曲线与运动约束条件,以能耗最优为核心目标,生成精准的足端运动轨迹,最终确保规划动作得以高效执行。

-
运动特征的能耗与风险量化分析
在成功实现对连续动作的数学表达之后,研究团队进一步构建了系统动力学模型与概率分布模型,以在全面实现运动特征的能耗与风险量化分析。通过这一分析过程,团队能够获取准确的数值参考,为机器人在复杂环境中的在线决策提供坚实有力的数据支撑,从而确保机器人能够做出更为科学、合理的运动决策。


-
扩展马尔科夫决策模型路径规划算法
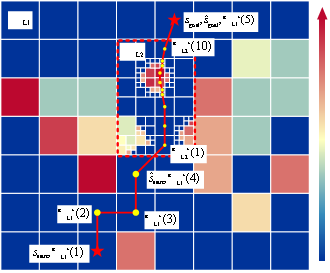
在路径规划算法方面,研究团队基于四叉树结构对状态空间进行了离散化分析。在此过程中,团队将机器人与环境接触的节点定义为“足端运动相关节点”,并深入分析这些节点的几何特征与空间分布特性。通过这一系列分析工作,团队成功实现了机器人运动策略的智能决策,显著提高了路径规划的合理性与有效性。

-
最优路径高效求解
针对最优路径高效求解这一核心问题,研究团队创新性地提出了信息引导的值迭代算法。该算法紧密结合四叉树地图的分层存储特性,仅在与目标点强相关的方向上进行深度搜索与迭代,从而有效降低了计算复杂度,大幅提升了最优路径的求解效率。


-
在多层地图上的扩展
考虑到星球探测车的车载处理器性能存在一定限制,研究团队将多层地图技术巧妙地应用于算法之中。这一举措进一步降低了算法的计算时间,显著提高了计算效率,为机器人在复杂环境中的实时路径规划提供了更为可靠的技术保障。
▍算法有效性检验:TAWL探测车实验
为验证所提算法的实际效果,研究团队针对轮腿式TAWL星球探测车在复杂地形下的路径规划能力,开展了一系列实验测试。
实验设计围绕不同运动策略展开,这些策略的转移概率与动作执行后车身的概率分布紧密相关,而状态不确定性则作为动作执行过程中的累积量被纳入考量。特别是在混合运动策略下,对行进距离有着特定要求,例如爬楼梯和上下平台等具体场景,均有相应的计算公式进行支撑。通过对比LTV – SDE模型与改进后的模型,研究团队发现改进模型由于全面考虑了从起点到终点的整个过程,因此与实验结果的拟合度更高,显示出更强的实际应用价值。

在实验实施环节,探测车采用了不同处理器分别处理视觉和运动控制算法的设计方案。在室内实验中,团队构建了非结构化地形环境,并设置了试验A和B。这两组试验的起点和终点相同,但概率系数设置不同,从而导致了路线选择和风险评估的差异。具体而言,试验A的路线较短,但不确定性较大,能量成本相对较低;而试验B则风险较低,车身欧拉角更为稳定。此外,团队还在室外进行了试验C和D。试验C在缓坡环境下进行,实现了阻抗和姿态的有效控制,探测车采用轮式前行方式以适应地形;试验D则在导航阶段采用轮式行走,越障阶段则采用混合行走方式,并详细记录了车体欧拉角和足端接触力等关键数据。

基于实验地图,研究团队从节点访问次数、计算时间和能耗、成功率三个维度对不同算法的性能进行了比较分析。在节点访问次数方面,Informed VI算法和多层地图方法相较于VI算法,明显减少了总访问次数,显示出更高的效率。在计算时间和能耗方面,VI算法虽然计算量大,但能够生成最优路径;而Informed VI算法则在保证路径最优性的前提下,有效减少了计算时间;多层地图方法的计算时间更短,但路径质量略逊于VI算法;RRT算法计算时间短,但路径质量较低;CC – RRT算法路径质量优于RRT,但计算时间更长且结果具有一定的随机性。在成功率方面,VI、Informed VI、Multilayer和A算法在合适的条件下能够保证找到解;而RRT和CC – RRT算法的成功率则与参数设置和障碍物密度密切相关。
综合以上实验数据,可以得出结论:研究团队所提算法在确保机器人安全性的同时,兼具高效性和环境适应性优势,特别是在非均匀地图环境下表现出较强的适应能力。
▍结语与未来展望
研究团队所提算法在分辨率可变栅格地图上具有较好的适应性,信息引导值迭代算法可以在不失去最优性的前提条件下提高计算效率。
据悉,该团队未来将在此研究基础上,进一步深入系统地探索轮腿式机器人、爬行机器人等智能体的运动规划与控制理论。团队致力于突破机器人具身感知、智能决策与自适应控制等关键技术瓶颈,以期最终实现在外太空星球探测、小行星探测等深空探测任务中的实际应用。这一研究方向不仅具有重要的科学价值,也将为机器人技术的未来发展开辟新的道路。
参考文章:
https://ieeexplore.ieee.org/document/10907969
(文:机器人大讲堂)