

在机器人操作领域,通用抓取作为核心功能,对推动工业自动化、提升物流效率、实现农业精准作业以及促进消费品创新等方面意义重大。然而,要让机器人像人类一样灵活抓取从羽毛到哑铃、从酥脆薯片到坚硬金属等各类物品,一直是该领域的重大难题。
通用性抓取能力的核心在于设计出足够灵活、自适应的机器人抓手,无需为不同物体反复调整,就能应对未知物体和复杂环境。但现实生活中的物体在重量、易碎程度、尺寸和形状上的千差万别,这使得实现真正的通用抓取成为一项艰巨挑战。
此前相关研究主要采用两种策略来提升抓取多样性:一是组合多种抓取机制,如捏合与吸附,以弥补单一机制的不足;二是融合刚性结构与柔性结构,效仿人类手指“刚骨柔肤”的设计。
但这两条路线都面临共同困境:要么是不同机制互相干扰无法发挥优势,要么是难以在保持抓手紧凑和高性能的前提下有效集成,亟需简单高效的解决方案。
▍研制混合多模式抓手HMG,离人手更近一步
针对上述挑战,中山大学张锦绣教授、吴嘉宁副教授与华中科技大学吴志刚教授团队携手合作进行深入研究,并成功研制出混合多模式抓手(HMG)。该抓手创造性地融合了捏-吸混合抓取与刚-柔耦合结构,在技术上实现了重要突破。
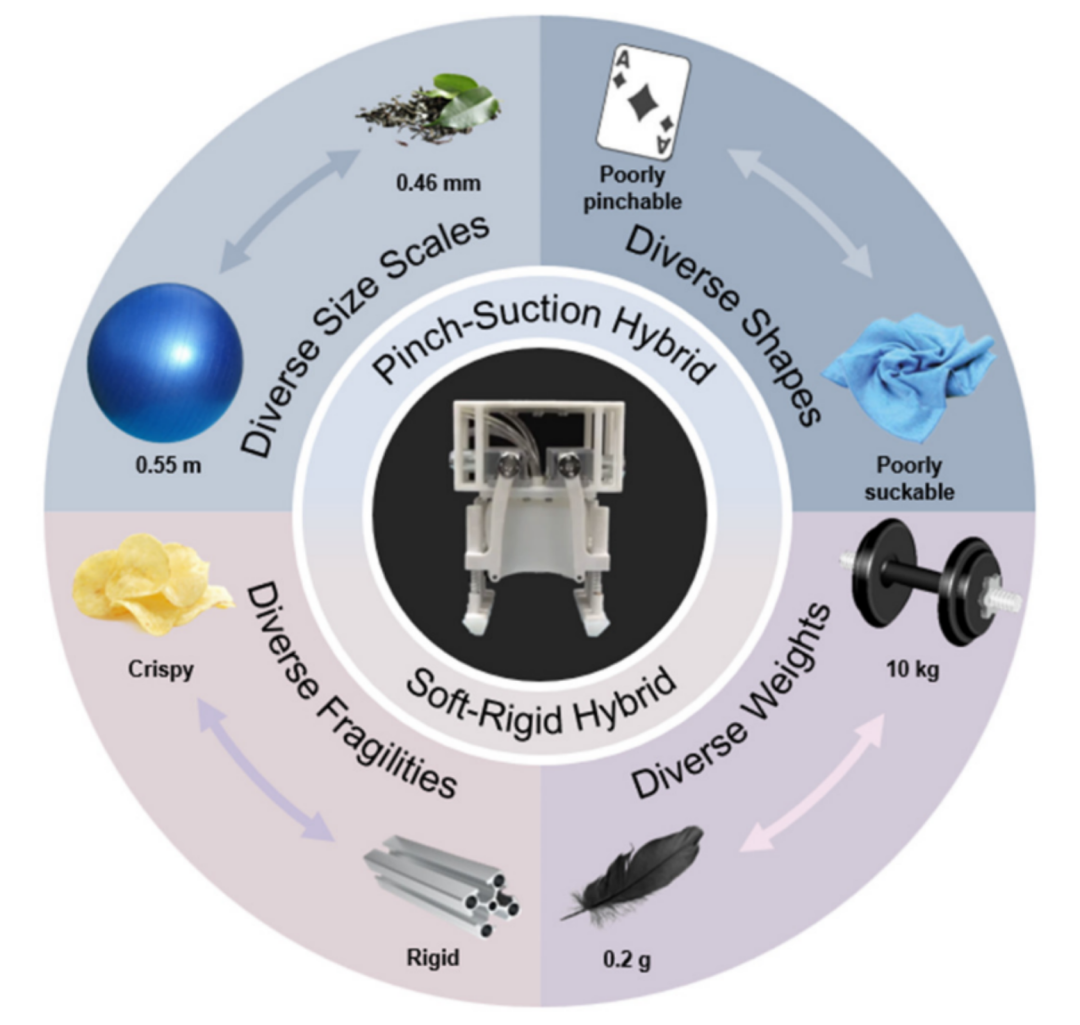
图|HMG的抓通用性抓取能力
HMG将四种操作模式集成于紧凑结构中,并通过集成指尖和吸盘的柔性压力传感器,具备了感知交互力的能力,从而实现了更智能的闭环抓取。同时,通过引入两种简洁而高效的协同机制,研究团队也成功协调了夹捏与吸附操作之间的配合,以及软硬组件之间的协同工作。
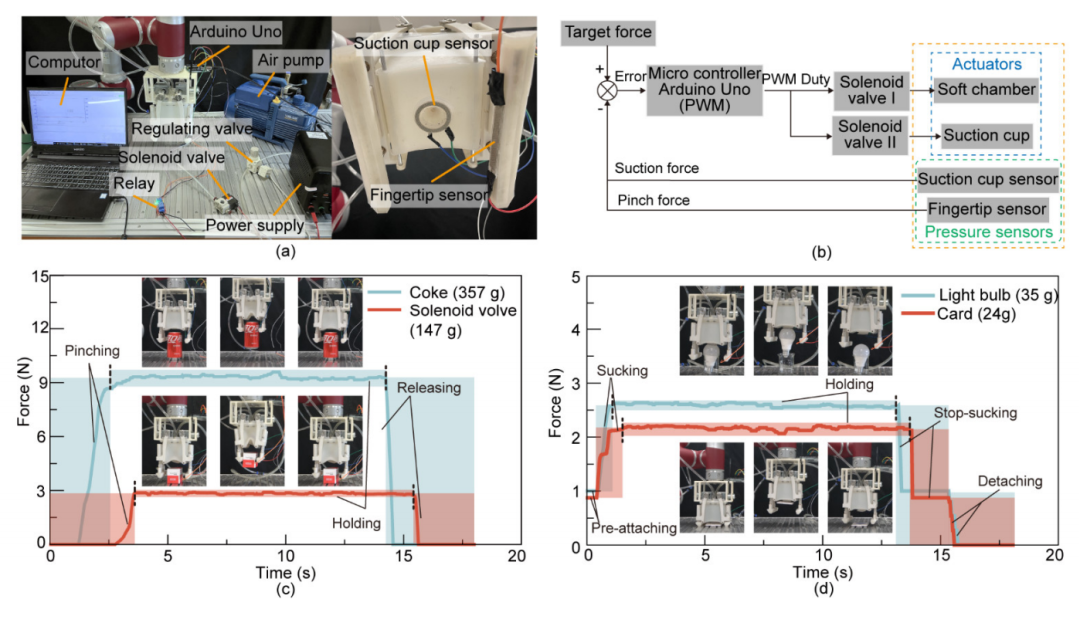
图|集成柔性压力传感器的闭环抓取
实验测试中,HMG展现出突破性多目标抓取能力,实现了在重量(0.2g-10kg)、材质(果冻-铝材)、尺寸(0.46mm-0.55m)三个维度的全覆盖,此外,HMG也突破了传统夹取方式对异形物体的处理局限,展现出出色的场景适应性,无论是复杂工业环境还是极端水下工况,均能保持稳定可靠的作业性能。
这一研究首次通过巧妙结合多种抓取机制与刚柔结构,证明了拓展抓取多样性的巨大潜力,提供了一套简单高效的多模式协同解决方案。其创新设计理念和精巧机构,为开发下一代高性能智能机器人抓手树立了重要参考标杆。日前其相关研究成果已以“Enhancing Grasping Diversity with a Pinch-Suction and Soft-Rigid Hybrid Multimodal Gripper”为题,在机器人领域顶刊IEEE Transactions on Robotics发表。博士生赵郁文和朱嘉淇为共同第一作者,中山大学张锦绣教授、吴嘉宁副教授以及华中科技大学吴志刚教授为共同通讯作者。
▍HMG机械设计与工作机制解析
HMG集成了四种操作模式,并通过引入“选择性激活机制(SAM)”与“顺应性自适应机制”两种高效协同机制,成功实现夹捏与吸附操作的精准协调,以及软硬组件的协同作业。其整体结构设计紧凑高效,通过多模态操作设计,将刚性驱动系统(RAS)与柔性驱动系统(SAS)通过法兰联轴器和平滑轴固定于装配平台。刚性手指采用高性能尼龙材料,通过选择性激光烧结(SLS)3D打印技术成型,确保高强度与耐久性;柔性腔室与吸盘选用硅橡胶材料,兼具优良弹性与密封性。通过精确控制柔性腔室负压与刚性电机旋转角度,HMG可实现四种操作模式的精准切换与稳定执行。具体来说:
-
多操作解耦模式设计
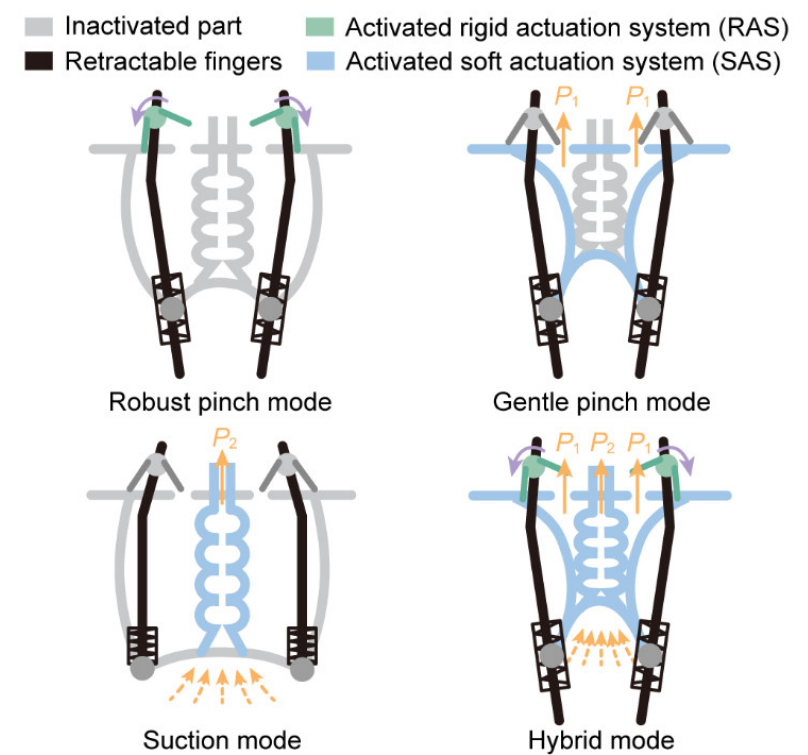
图|多操作模式示意图
HMG的设计核心在于其独特的四重操作模式:得益于刚性驱动系统(RAS)与柔性驱动系统(SAS)的紧密集成,该抓手可通过刚性、柔性两套驱动系统的独立或协同工作,能灵活切换为“强力捏合”模式(轻松抓起哑铃)、“轻柔捏合”模式(温柔对待脆弱物体)、“纯吸附”模式(搬运篮球等大件)以及“混合操作”模式(提升复杂抓取的稳定性)。
-
选择性激活机制(SAM)
研究团队创新设计了一种“选择性激活机构”(SAM),该机制能够根据任务需求灵活激活刚性或柔性组件,并实现两者之间的完全解耦。这一机制确保了刚性组件和柔性组件在协同工作时互不干扰,从而充分发挥了各自的优势。通过将该机制引入HMG,并为其配备由被动伸缩指节和可变形吸盘构成的柔顺自适应机构,研究团队实现了HMG刚柔系统的快速解耦,让捏吸模式切换流畅无阻,无需复杂控制系统。
-
顺应性自适应机制
为进一步提升HMG的适应性和鲁棒性,研究团队引入了顺应性自适应机制。该机制通过可伸缩手指与柔性吸盘的组合设计,使得夹持器在接触目标物体时能够自动调整其形状和姿态。当夹持器夹捏高物体时,可伸缩手指能够延长并紧密贴合物体表面;而当需要吸附扁平物体时,手指则能够自动压缩长度,为吸盘提供足够的接触空间。这种顺应性设计使得HMG无需复杂的传感和控制装置,即可实现对不同形状和尺寸物体的稳定抓取。
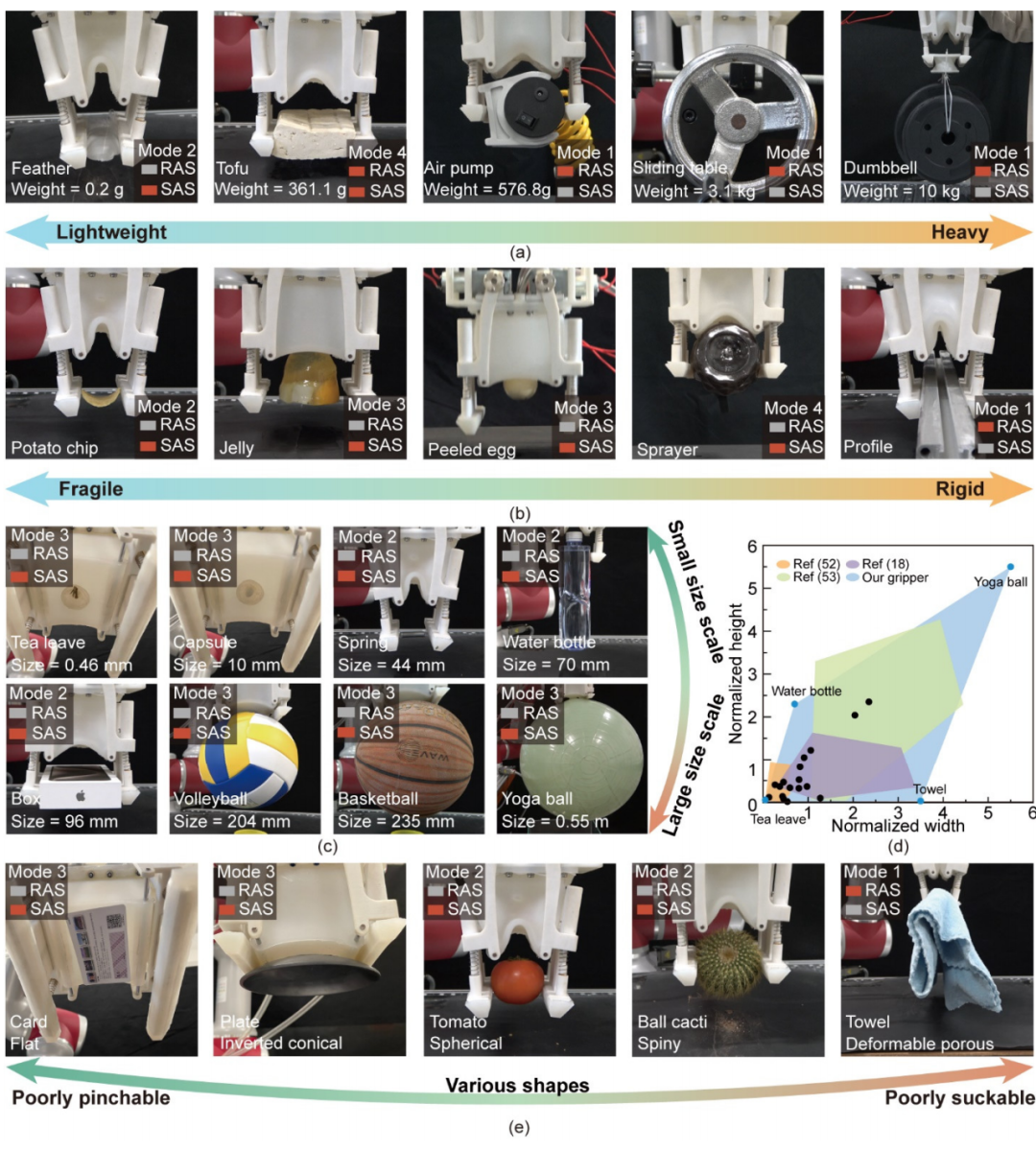
得益于精细巧妙的机构设计,HMG展现出出色的抓取多样性:重量上,可轻捏0.2克的羽毛,也能抓起10公斤的哑铃;物体特性方面,可无损抓取易碎的薯片和果冻,也能拿住坚硬的铝合金;尺寸上,能吸起0.46毫米的茶叶,也能抓起直径0.55米的大瑜伽球;形状处理上,可应对扁平卡片、倒锥形盘子、带刺仙人球、多孔毛巾等多种“异形”物品。
视频|抓取多样性展示
在抗干扰能力方面,HMG也表现出极强的鲁棒性和适应性。即使面对高达4.5m/s²的剧烈晃动(接近汽车急刹加速度),仍能稳持物体。对于姿态倾斜的玩偶、表面崎岖的假山模型等重心偏移的不规则物品,其刚柔耦合结构可自适应调整接触力分布,有效吸收震动能量,展现出强大的抗扰动能力和形状适应能力。
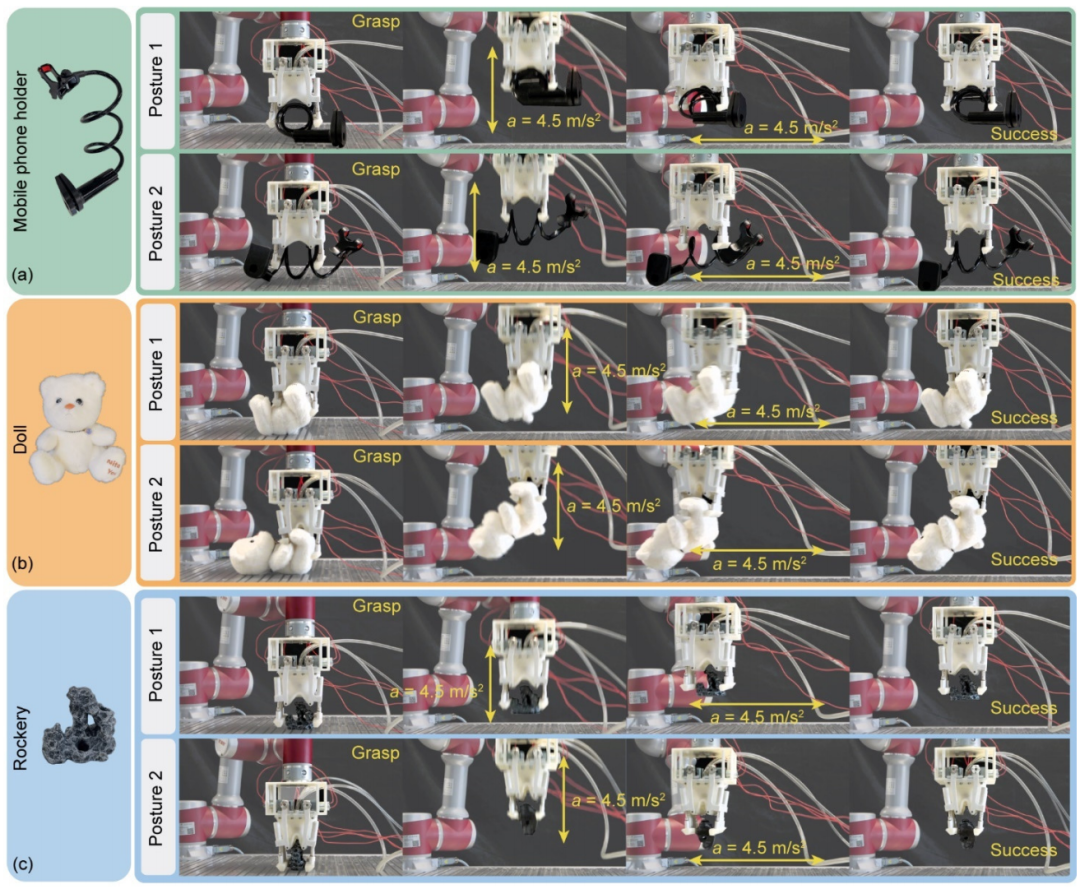
视频|动态环境下稳定抓取不规则物体
▍HGM性能评估与实验验证
为全面评估HGM的变形特性、夹捏力、吸附力及抓取成功率等性能,研究团队进行了多项测试。为进一步展示HMG的实用性和多样性,研究团队还展示了HMG在处理不规则形状物体、执行现实世界操作任务、水下作业及闭环抓取中的潜力。
-
复杂操作任务应对
传统抓手困于单一动作,HMG实现了四大操作模式流畅协同,可完成拟人化连续作业。通过顺序激活HMG的多种操作模式,研究团队成功完成了书籍整理、牛奶服务和排骨汤烹饪等复杂现实世界任务。
在模拟家务场景中,HMG先用吸附模式将平放的书本挪到指定书堆旁边,再切换轻柔捏合模式提起书本并放置在书堆顶部。
视频|现实世界操作任务一:书籍整理
对于精细操作,HMG利用轻柔捏合模式单手持杯完成倒牛奶动作。
视频|现实世界操作任务二:牛奶服务
在厨房作业场景中,HMG甚至能完成“煲汤”操作——多种操作模式加入各种食材、佐料和水,之后盖上锅盖。
视频|现实世界操作任务三:煲骨头汤
这种多模式协同作业能力,可赋予机器人处理开放式任务的实用价值。
-
流水线操作
针对运动目标的抓取难题,HMG开发出独特的两级抓取策略。
在水果分拣流水线上,当柑橘经过机器人抓手下方时:首先由柔性驱动系统启动轻柔捏合模式,通过柔性结构缓冲撞击并建立初始接触;之后迅速切换至刚性驱动的强力捏合模式,自动锁死果体。
视频|稳定抓取运动物体
-
水下作业
HMG的轻柔操作特性在水下场景大放异彩。在模拟海洋环境的水族箱中,HMG通过轻柔捏合模式完成了对六类典型目标的零损伤操作:珊瑚礁采样、活体海胆、螃蟹、牡蛎等水产品的捕获、可乐罐回收、以及陶瓷杯打捞。
视频|水下作业
通过以上实验演示,研究团队不仅验证了HMG在抓取多样性方面的技术优势,更充分展现其在日常生活服务、工业生产及特种作业领域的广泛应用潜力。
参考文章:https://ieeexplore.ieee.org/document/11025142
(文:机器人大讲堂)