
极市导读
东北大学、Meta和英国萨里大学联合提出CostFilter-AD,首次引入“匹配代价滤波”范式用于无监督异常检测,通过构建匹配代价体并滤波优化,显著提升检测精度与边界清晰度,且作为通用插件适配主流检测框架,为工业质检等场景带来更智能可靠的解决方案。>>加入极市CV技术交流群,走在计算机视觉的最前沿
ICML 2025 · 多类UAD · 匹配代价体 · Plug-in插件 · 工业视觉 · 通用轻量
本文第一作者为东北大学博士生张哲,导师为中国工程院院士柴天佑教授。该工作由东北大学、Meta 和英国萨里大学合作完成,通讯作者为吴高昌副教授(东北大学)与朱霞天副教授(萨里大学)。
论文标题:CostFilter-AD: Enhancing Anomaly Detection through Matching Cost Filtering
GitHub地址:https://github.com/ZHE-SAPI/CostFilter-AD
Slide:https://github.com/ZHE-SAPI/CostFilter-AD/blob/main/Materials/CostFilter-AD_slide_ICML2025.pdf
ICML 主页:https://icml.cc/virtual/2025/poster/46359
一、Lay Summary
你是否想过,工厂是如何在很多种不同产品中,精准识别出浅浅的划痕、缺失的元件,甚至是几乎察觉不到的微小缺陷?这远比“图像识别”要复杂。当前许多 AI 系统依赖于将待测图像与正常样本进行匹配来判断异常,但这一过程极易受到噪声干扰,尤其在处理模糊、低对比或结构细微的缺陷时,常常出现误报与漏检。
在 ICML 2025 接收论文中,来自东北大学、Meta 和英国萨里大学的研究者联合提出 CostFilter-AD,首次将“匹配代价体滤波”系统性引入无监督异常检测(UAD)。与其说关注“学得更好”,CostFilter-AD 更关注“比得更准”。它构建一个异常代价体来全局表征图像与正常模板之间的匹配成本,并通过滤波机制清除噪声、增强边界,使得微小异常也难以遁形。
更重要的是,CostFilter-AD 无需真实缺陷样本参与训练,仅依赖正常样本就能精准检测各类未知异常,具备强泛化能力与部署适应性。作为一个通用插件式模块,它能无缝集成到现有检测方法中,有效提升检测精度与边界清晰度,为工业质检带来更智能、更可靠的解决方案。
二、任务背景与挑战
在工业质检、安防监控、医疗影像等场景中,无监督异常检测(Unsupervised Anomaly Detection, UAD)日益成为核心技术之一。由于现实世界中异常样本稀少、类型多样、标注昂贵,UAD 凭借“仅用正常样本训练”的能力,在工业界获得了广泛关注。
但一个悄然被忽视的难题也在同步放大:当前最先进的检测模型,无论是基于图像重建的 Diffusion/UNet/ViT,还是基于特征对比的 DINO/ViT,在生成异常图(anomaly map)时几乎都隐含了一个过程:匹配(matching)。而这个看似“简单”的操作,常常掩盖了检测失败的根源。匹配过程中的噪声,可能是真正导致误检与漏检的幕后黑手。
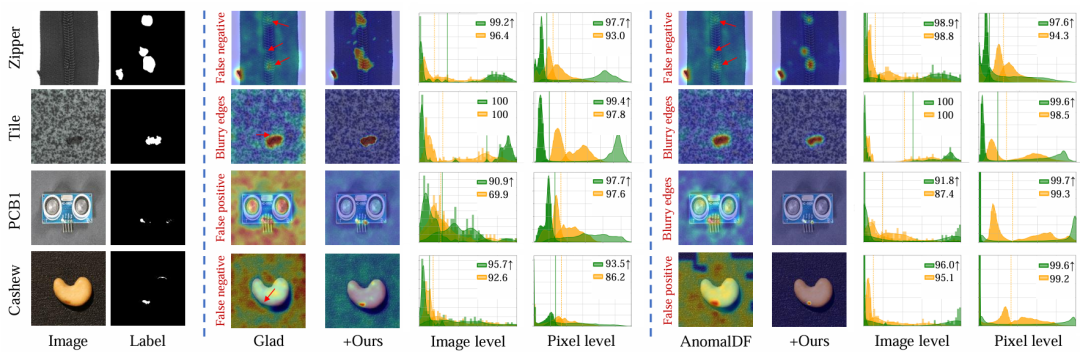
我们展示了图像级与像素级 logits 的可视化结果及其核密度估计曲线(Parzen,1962)。其中,基线方法的结果以黄色标示,我们的方法以绿色标示。相比之下,我们的模型在检测异常时噪声更少,且在正常与异常 logits 之间提供了更清晰的区分,表现更加优越。
三、我们的方法突破口在哪里?
动机分析:不是模型不够强,而是“匹配得不够准”。
目前主流 UAD 方法大致分为两类:
-
重建式方法:将输入图像还原成“正常版本”,异常区域将表现为高残差; -
嵌入式方法:将输入图像投影到特征空间,与正常样本进行相似性匹配。
两类方法虽然形式不同,但在最后生成 anomaly heat map时,本质都要完成一种“输入 vs 正常样本”的匹配。
问题在于:现实中的匹配从不完美。
-
重建式方法中,Diffusion 等模型可能会错误保留异常结构(e.g. short cut issue),形成“伪正常”图像; -
嵌入式方法中,基于预训练特征(如ViT、DINO)提取的嵌入往往存在尺度、视角、纹理的偏差,使得相似性计算被高维噪声干扰。
然而,这些 “匹配噪声” 长期被忽视,异常检测系统只能被动接受“残差”或“相似性”分数,而非从源头优化其可靠性。
四、CostFilter-AD:首提“匹配代价体滤波”范式
为解决这一核心难题,我们提出一种全新视角:
异常检测 = 匹配代价体构建 + 滤波优化 + anomaly map生成,具体步骤为:
-
构建完整的匹配代价体(Cost Volume),显式表征“输入图 vs 正常样本”之间的多维匹配关系;
-
引入一个基于双流注意力(Dual Stream Attention)的3D U-Net网络,对代价体进行细粒度滤波;
-
输出结构清晰的 anomaly heat map,作为最终异常检测分割图。
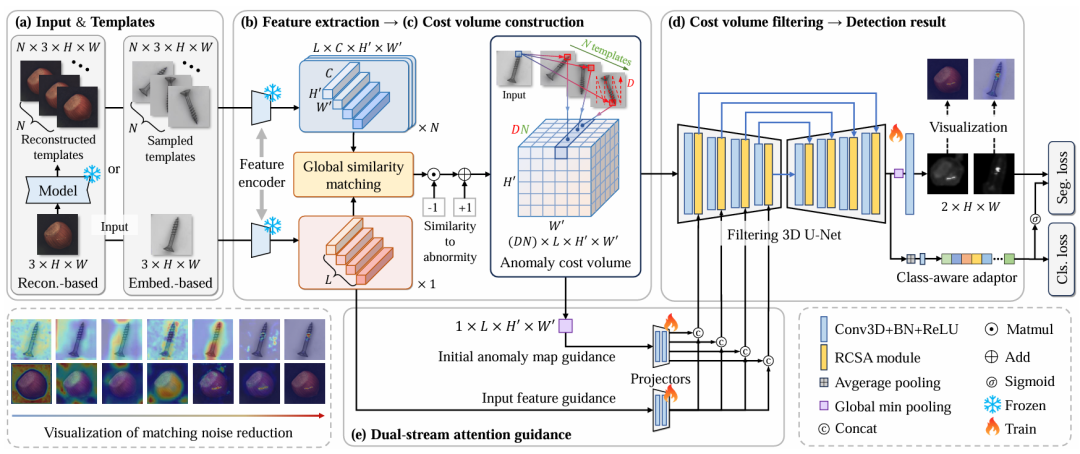
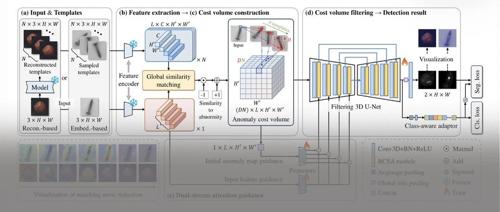
我们将无监督异常检测(UAD)重新表述为一个“匹配代价滤波”过程。(i) 首先,利用预训练编码器从输入图像和模板图像中提取特征,模板可以是重建得到的正常图像,或随机选择的正常样本;(ii) 接着,基于全局相似性计算构建异常代价体(anomaly cost volume);(iii) 然后,设计一个代价体滤波网络,结合从输入特征和初始异常图中提取的注意力查询信息,对代价体进行细化,生成最终检测结果;(iv) 最后,引入类别感知适配器,以应对类别不平衡问题,并提升模型对多类异常的同时检测能力。
方法亮点:
-
机制创新:首次引入“匹配代价体 + 滤波”到UAD领域;
-
即插即用:不需改动原模型架构,适配所有主流检测器;
-
性能显著提升:Image-AUROC & Pixel-AUROC等七种异常检测指标全面增长;
-
泛化增强:处理模糊边界、小尺寸异常亦很有效。
五、方法细节拆解:不是再造大模型,而是细化匹配过程
CostFilter-AD包括以下三个关键阶段:
1.构建匹配代价体(Matching Cost Volume)
我们不再仅仅计算一对图像之间的单一匹配值,而是:
(a) 对输入图像与多个正常模板图像进行全局像素级匹配;
(b)在每个特征层上计算余弦相似度,得到三维代价体(空间维度 × 匹配维度 × 通道);
(c)转换为 anomaly cost(1 − similarity),形成全局异常热图。
与常见的最近邻匹配KNN不同,CostFilter-AD 捕获了多模板、多尺度、多位置之间的结构性匹配模式。
2.匹配代价体滤波(Cost Volume Filtering)
匹配代价体矩阵虽然得到,但其中依然混有大量“误判”:正常边缘误认为异常(或相反)、异常细节被模糊覆盖等。为此我们引入一个具备Dual-Stream Attention机制的3D U-Net网络,对代价体进行去噪与增强:
(a) 通道引导(MG):使用初始 anomaly 热图引导模型关注更可能为异常的通道区域;
(b) 空间引导(SG):使用输入图特征作为空间注意力,引导模型保留边界结构;
(c) 残差引导机制(RCSA):融合上述注意力流,逐层优化代价体表示。
经过滤波后,输出 anomaly map 的分布更集中、边界更清晰。
3.类别自适应损失与泛化机制
为适配多类工业检测任务,我们设计了Class-Aware Adapter:
(a)利用 soft logit 调整 focal loss 的聚焦因子,自适应平衡易错类别;
(b)优化结构损失(SSIM + soft IoU),增强检测的结构一致性。
这让 CostFilter-AD 在单模型处理多类 anomaly时保持高效与准确。
六、实验验证:四大数据集、五个最新baseline、七种异常检测指标全面刷新
CostFilter-AD 被集成至五大主流 UAD 框架中:
-
GLAD(Reconstruction-based Diffusion, ECCV’24); -
HVQ-Trans(Reconstruction-based Transformer, NeurIPS’23); -
AnomalDino(Embedding-based Dinov2, WACV’25); -
UniAD(Embedding-based Transformer, NeurIPS’22); -
Dinomaly(Reconstruction-based Transformer, CVPR’25).
我们在 MVTec-AD、VisA、MPDD、BTAD 四个工业数据集上进行像素级和图像级别异常检测。
(a) 定量结果:
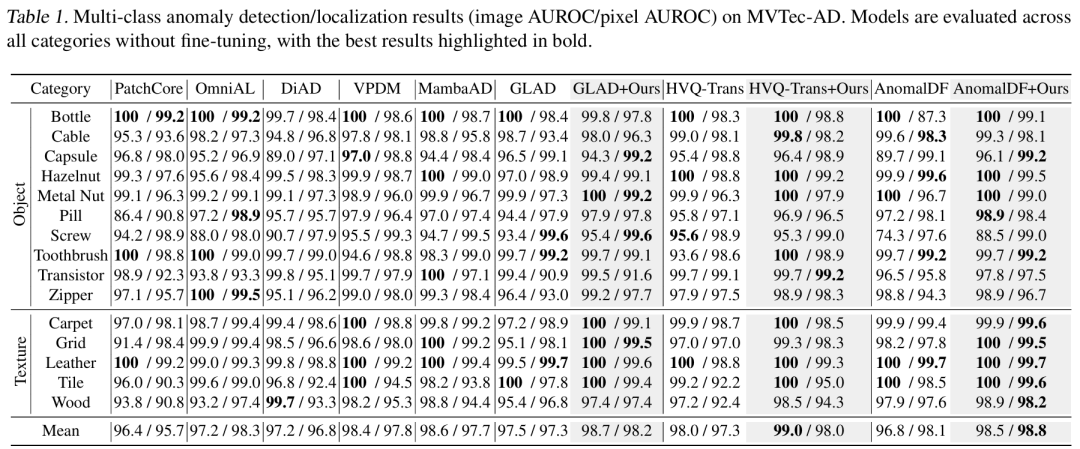
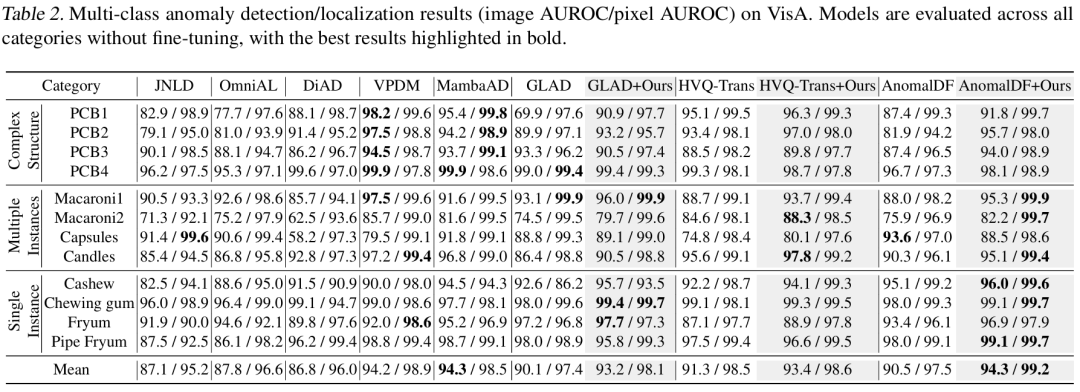
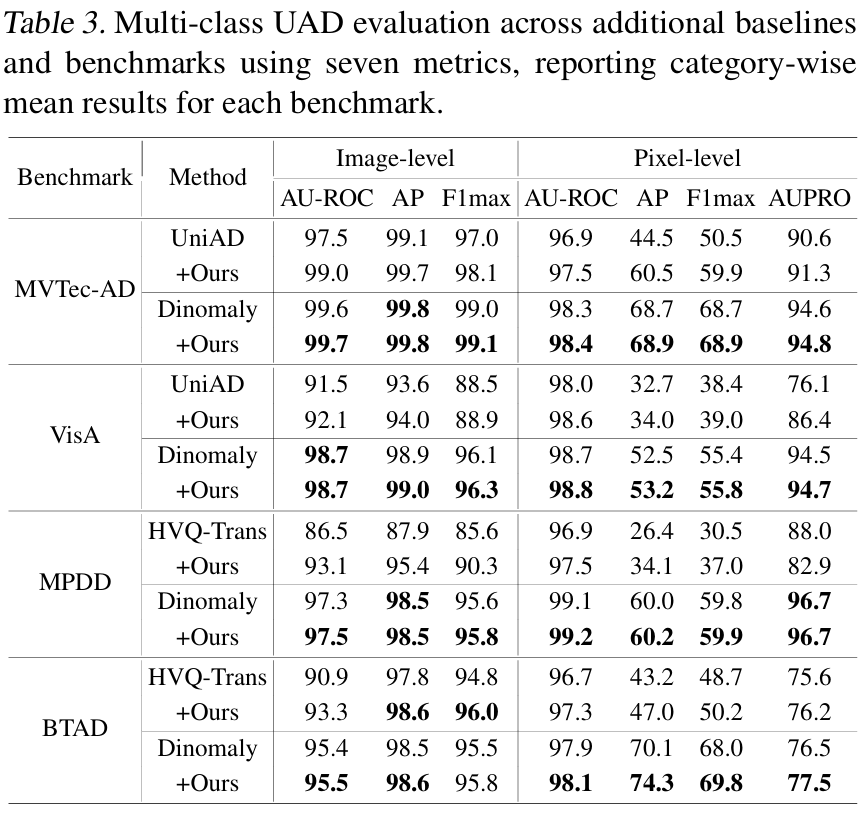
更多测试指标请参考论文附录。
(b)可视化结果:边界更清晰,baseline漏检区域被成功检测;
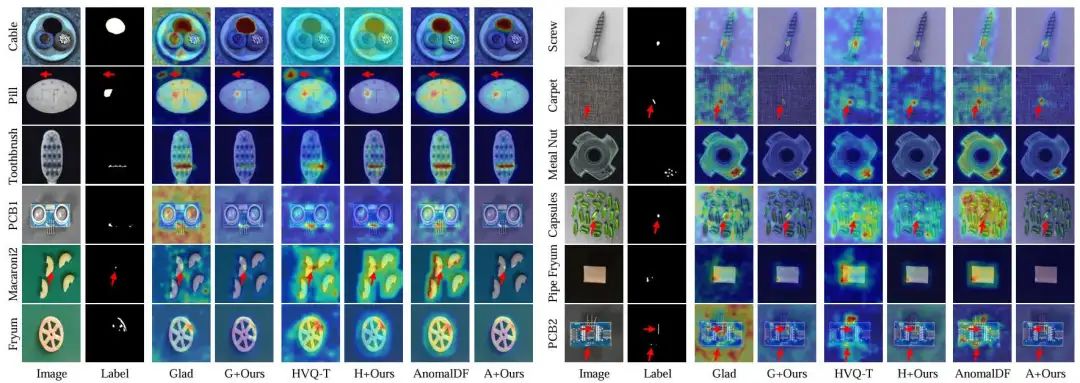
我们将本文方法与 GLAD(G)、HVQ-Trans(H)和 AnomalDF(A)在 MVTec-AD(上三行)和 VisA(下三行)数据集上的结果进行对比。通过集成至现有方法中,我们的方法能够有效缓解匹配噪声问题(例如:PCB2 中的漏检、Pill 中的误检,以及 Carpet 中的模糊边界),显著提升异常检测性能。
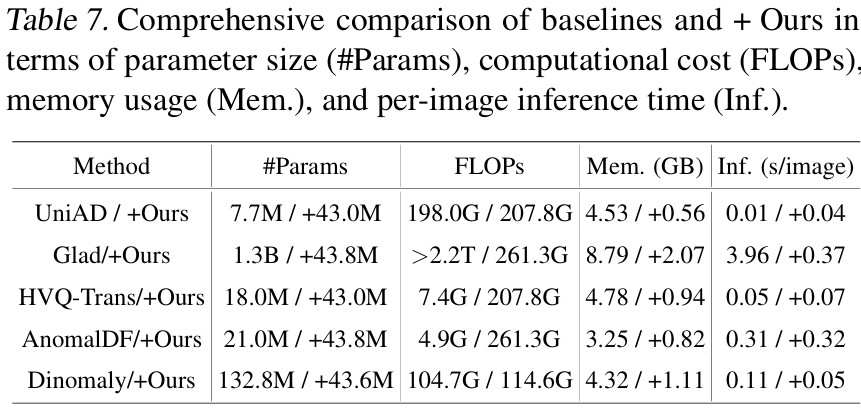
(c) 内存&推理:平均仅提升显存和延时较小,有助于实际可部署
七、即插即用,轻量部署,工业友好
CostFilter-AD 是一款即插即用(plug-and-play)的异常检测增强模块:
(a)支持多种输入模板:重建图、特征模板、混合中间表示;
(b)兼容主流模型:ViT-B/8、EfficientNet-B4、DINO、Diffusion 全部适配;
(c)部署无压力:可部署于工业边缘设备、服务器或API服务端。
八、方法总结:从匹配修正出发,重塑异常检测核心范式
CostFilter-AD 的核心理念在于重塑 anomaly map/score 的生成方式:
异常检测的难点,不仅在于是否能还原/嵌入得好,更在于是否“比”得准确。
通过构建代价体并对其进行滤波优化,我们重新定义了异常分数的构成逻辑:不是谁更像,而是“匹配结果如何更可信”。
这一思路不仅适用于图像异常检测,或许还可迁移至:
(a) 时序异常检测(e.g. 预测轨迹 vs 实际轨迹的匹配代价);
(b)视觉异常追踪(匹配掩码 vs 模板结构);
(c) RL状态匹配估计(当前状态 vs 高奖励状态的策略匹配)等场景。
欢迎关注团队主页、代码仓库,或联系作者学术交流!
(文:极市干货)