在新锐论前沿第 5 期中,法国国家科学研究中心的博士后研究员闫友璨博士,将以「基于柔性磁膜的自解耦及超分辨率触觉传感」为题带来技术分享。
由具身触觉社区主办、HyperAI超神经协办的「新锐论前沿」第五期线上分享活动,将于 12 月 26 日(周四)19 点正式开启。本次活动邀请到了法国国家科学研究中心的博士后研究员闫友璨博士,他将以「基于柔性磁膜的自解耦及超分辨率触觉传感」为题带来技术分享,点击阅读原文即可报名参与线上分享!

img from: https://dribbble.com/shots/9879639-Fingerprint-Scan-Interaction
🎁 本次活动继续设立抽奖环节,报名参与线上分享的小伙伴有机会获得由 OpenBayes贝式计算赞助的算力福利——60 小时 NVIDIA RTX 4090 算力资源使用市场(资源有效期 1 个月)价值 160 元,帮助小伙伴们上手具身触觉。
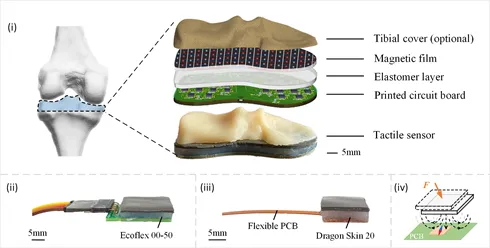
在本次讲座中,闫友璨博士将介绍一种基于柔性磁膜的触觉传感器的设计及应用,重点探讨如何利用正交磁化的 Halbach 阵列实现三维力的自解耦,进而简化传感器的硬件设计及标定流程。
一、 嘉宾介绍
闫友璨博士是法国国家科学研究中心 (CNRS) 的博士后研究员,导师是 Abderrahmane Kheddar 教授。他于 2022 年获得香港城市大学博士学位及优秀博士论文奖,导师是潘佳教授和申亚京教授,在此之前研究生和本科分别就读于西安交通大学和华北电力大学。其研究方向为机器人触觉感知,相关成果已发表于 Science Robotics, Nature Machine Intelligence, RA-L 等期刊。他于 2023 年入选 RSS Pioneers,并参与组织了 2024 年 RSS Pioneers Workshop 及「Tactile Sensing for Robot Learning」Workshop。
https://sites.google.com/view/ycyan
二、 讲座介绍
触觉是机器人感知外部环境并与之交互的重要组成部分,为赋予机器人触觉感知能力,研究人员已开发出了基于各类传感原理的触觉传感器(如压阻、电容、视觉、光纤、压电、磁场等)。
本次报告将介绍一种基于柔性磁膜的触觉传感器的设计及应用,并讨论如何利用正交磁化的 Halbach 阵列实现三维力的自解耦,进而简化传感器的硬件设计及标定流程。
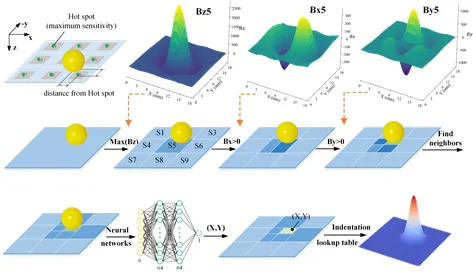
另外,本次报告将探讨基于机器学习和物理模型的超分辨算法设计,即如何利用相邻触觉传感单元之间的信号重叠 (overlapping or crosstalk) 实现高于物理分辨率(相邻传感单元的中心间距)的定位精度。最后闫博士将简要介绍触觉传感器的两个实际应用:基于贝叶斯优化的机器人触诊,以及基于深度学习的材质分类。
最后,分享一个技术沙龙!Meet AI Compiler 第 6 期将于 12 月 28 日在上海开幕,点击图片了解讲师分享主题,扫描二维码即可直接报名。
(文:HyperAI超神经)