


英伟达GTC2025 正式发布了 GR00T N1,号称世界首个开源的人形机器人通用模型!目标:让物理AI人人可用
简单来说,GR00T N1是一个通用的机器人大脑,只有 20 亿参数,却拥有惊人的潜力
下面我们一起来扒一扒GR00T N1的细节,给大家划个重点
GR00T N1 的硬核实力
GR00T N1 的强大,首先得益于它“吃”下的海量数据,NVIDIA 称之为 “史上最多样化的物理动作数据集”。这些数据来源非常丰富:
真实人形机器人遥操作数据:这是最直接、最宝贵的实战经验
大规模仿真数据:NVIDIA 慷慨开源了 30万+ 轨迹的仿真数据,助力研究社区
“幻觉”出的数据: NVIDIA 巧妙地运用了 SOTA 视频生成模型,创造出 “神经轨迹” 这种合成数据。这种数据在像素层面都遵循精确的物理规律,正如老黄所说,这简直是 “系统性的无限数据”!
动作令牌提取:为了让模型理解人类行为,NVIDIA 还开发了新算法,从真实人类视频和神经生成视频中提取 动作令牌
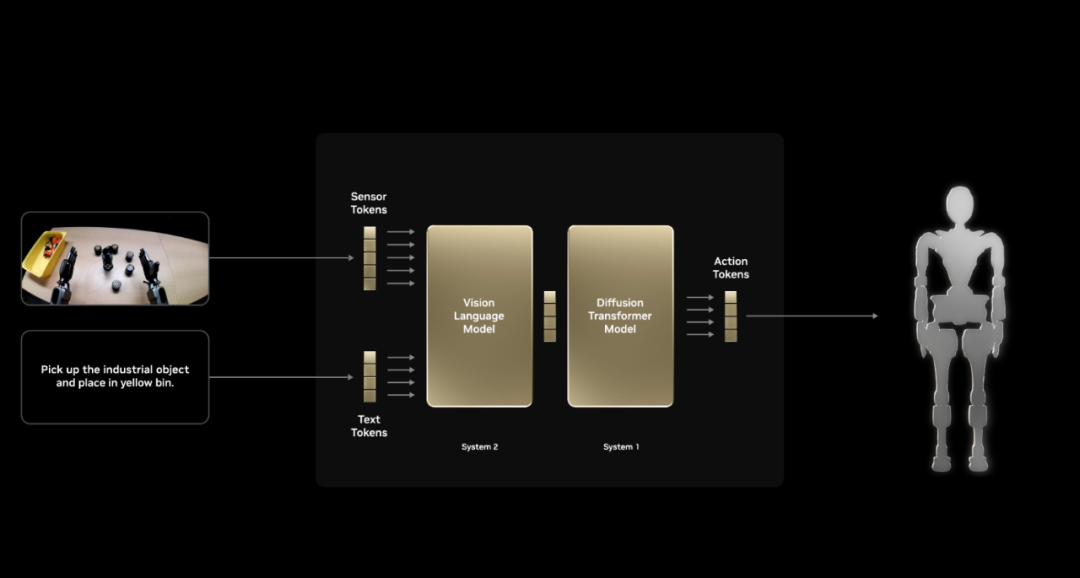
GR00T N1 的核心架构也相当简洁高效,它是一个 端到端的单神经网络,直接从“光子”输入到“动作”输出,中间没有复杂的层层堆叠:
视觉-语言模型 (System 2): 这部分是负责“思考”的系统,它基于 NVIDIA-Eagle 和 SmolLM-1.7B 构建,能够像人的 “System 2” 一样,通过视觉和语言指令来理解物理世界,进行环境和指令推理,最终规划出合理的动作
扩散 Transformer (System 1): 这部分负责“执行”,它扮演着 “System 1” 的角色,将 System 2 的规划 “渲染” 成流畅、精确的电机动作,频率高达 120Hz!
实战效果:多场景性能提升显著
GR00T N1 并非纸上谈兵,NVIDIA 将其部署在了自家的 GR1 机器人、 1X Neo 机器人 以及大量的仿真基准测试中。结果显示,在家庭和工业环境中,GR00T N1 在各种操作任务中实现了高达 +30% 的性能提升。
更令人惊喜的是,GR00T N1 还支持 跨具身 (cross-embodiment) 能力。这意味着,它不仅能驱动人形机器人,还能通过微调适配到其他机器人平台。例如,NVIDIA 就展示了 GR00T N1 在 HuggingFace LeRobot SO100 机械臂 上的应用,真正实现了 “开放的机器人大脑运行在开放的硬件上”。
GR00T N1 的预训练策略
为了训练 GR00T N1 这样的通用模型,NVIDIA 采用了稳健的数据策略。他们构建了一个数据金字塔,充分利用各种数据类型的互补优势:
底层: 包含语言信息的 人工标注视频数据集,捕捉人与物体的交互,提供自然运动模式和任务语义的洞察
中层: 由 NVIDIA Omniverse 平台 生成的 合成数据
顶层: 通过各种平台 遥操作收集的真实机器人数据,提供机器人能力的精确洞察
英伟达强调,他们使用了 NVIDIA Isaac GROOT blueprint 来实践这一方法。仅用 11 小时 就生成了超过 75 万条合成轨迹,相当于 6500 小时 或 9 个月 的人类演示数据。将合成数据与真实数据结合,相比仅使用真实数据,GR00T N1 的性能提升了 40%!
想上手?英伟达已经为你铺好路
NVIDIA 不仅发布了模型,还贴心地提供了 “Get started today ” 指南,并开放了丰富的资源:
模型权重: GR00T N1 2B 模型已在 Hugging Face 上开源
代码和数据集: Sample 数据集和 PyTorch 微调脚本可以在 NVIDIA/Isaac-GROOT GitHub 仓库找到。开源物理AI数据集也已发布在 HuggingFace Datasets 上
硬件需求: 微调至少需要 NVIDIA RTX A6000 或 GeForce RTX 4090 GPU,更高级的需求可以选择 NVIDIA DGX Spark 或 DGX H100 系统。推理可以使用 NVIDIA RTX A6000 GPU 或 Jetson AGX Orin。
性能实测:仿真与真实世界双重验证
为了全面评估 GR00T N1,英伟达在仿真和真实世界基准测试中都进行了验证
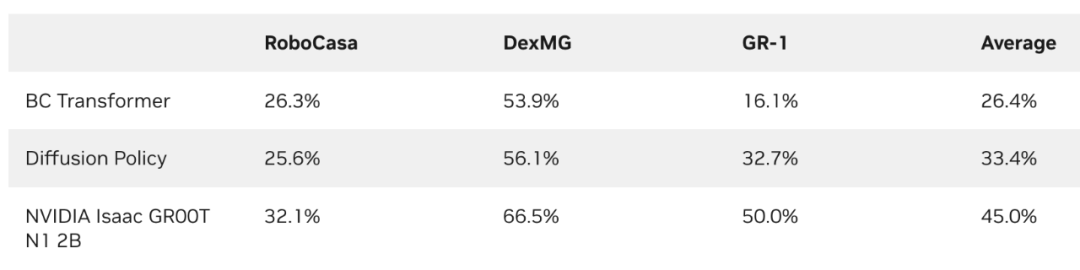
仿真环境:使用了三个基准测试,包括 RoboCasa, DexMG, GR-1,结果显示 GR00T N1 的平均成功率达到 45.0%,显著高于 BC Transformer 和 Diffusion Policy 等基线模型
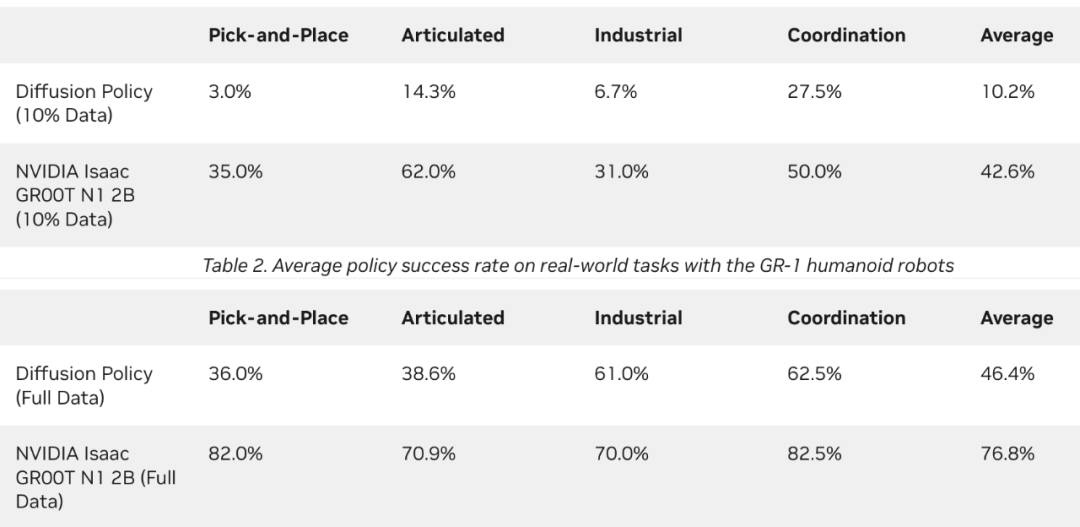
真实世界:在 GR-1 人形机器人上进行了桌面操作任务测试,包括 “Pick-and-Place”, “Articulated”, “Industrial”, “Coordination” 等任务。使用完整数据集训练的 GR00T N1,平均成功率高达 76.8%,远超 Diffusion Policy 模型
相关链接
GR00T N1 白皮书:
https://research.nvidia.com/publication/2025-03_nvidia-isaac-gr00t-n1-open-foundation-model-humanoid-robots
开源代码仓库:
https://github.com/NVIDIA/Isaac-GR00T/
HuggingFace 模型:
https://huggingface.co/nvidia/GR00T-N1-2B
开放数据集:
https://huggingface.co/datasets/nvidia/PhysicalAI-Robotics-GR00T-X-Embodiment-Sim
参考:
https://developer.nvidia.com/blog/accelerate-generalist-humanoid-robot-development-with-nvidia-isaac-gr00t-n1/
⭐
(文:AI寒武纪)