


在人工智能领域,目标检测技术一直是研究的热点和难点。近年来,随着深度学习技术的发展,目标检测模型的性能不断提升。然而,如何在保证检测精度的同时实现实时性,仍然是一个亟待解决的问题。近期,Roboflow 团队推出了一款名为 RF-DETR 的实时目标检测模型,它基于 Transformer 架构,不仅在精度上达到了新的高度,还实现了低延迟的实时检测。本文将详细介绍 RF-DETR 的技术原理、功能特点、应用场景以及如何快速上手使用。
一、项目概述
RF-DETR是由Roboflow开发的一种实时目标检测模型,它能够在边缘设备上实时运行实现高精度目标检测;基于Transformer架构,结合了预训练的DINOv2主干网络,能够在COCO数据集上达到60+的平均精度均值(mAP),同时保持25+ FPS的实时性。它支持多分辨率训练,用户可根据实际需求在精度和延迟之间灵活权衡,还提供预训练检查点,方便在自定义数据集上进行微调。RF-DETR适用于安防监控、自动驾驶、工业检测等多种场景,具有强大的领域适应性和便捷的部署能力。
-
RF-DETR-base:参数量为 2900 万,模型体积较小,适合在边缘设备上运行。
-
RF-DETR-large:参数量为 1.28 亿,提供更高的精度,但体积相对较大。

二、技术原理
(一)Transformer 架构
RF-DETR 属于 DETR 家族,采用 Transformer 解码器和混合编码器设计。与传统的基于 CNN 的目标检测模型相比,Transformer 能够更好地捕捉图像中的长距离依赖关系和全局上下文信息,从而提高检测精度。RF-DETR 通过自注意力机制有效捕捉图像中不同区域之间的关系,提升了目标检测的准确性和鲁棒性。
(二)预训练的 DINOv2 主干
RF-DETR 结合了预训练的 DINOv2 主干网络。DINOv2 是一个强大的视觉表示学习模型,基于在大规模数据集上进行自监督预训练,学习到丰富的图像特征。将预训练的特征应用到 RF-DETR 中,让模型在面对新领域和小数据集时具有更强的适应能力和泛化能力。
(三)单尺度特征提取
与 Deformable DETR 的多尺度自注意力机制不同,RF-DETR 从单尺度主干中提取图像特征图。这种简化模型结构的方式降低了计算复杂度,同时保持了较高的检测性能,有助于实现实时性。
(四)多分辨率训练
RF-DETR 支持在多个分辨率上进行训练,让模型在运行时可以根据不同的应用场景选择合适的分辨率。高分辨率可以提高检测精度,而低分辨率则可以减少延迟。用户可以根据实际需求灵活调整分辨率,而无需重新训练模型,从而实现精度与延迟的动态平衡。
(五)优化的后处理策略
在评估模型性能时,RF-DETR 基于优化的非极大值抑制(NMS)策略,确保在考虑 NMS 延迟的情况下,模型的总延迟(Total Latency)保持在较低水平。这使得模型在实际应用中的运行效率得到了真实反映。
三、功能特点
(一)高精度实时检测
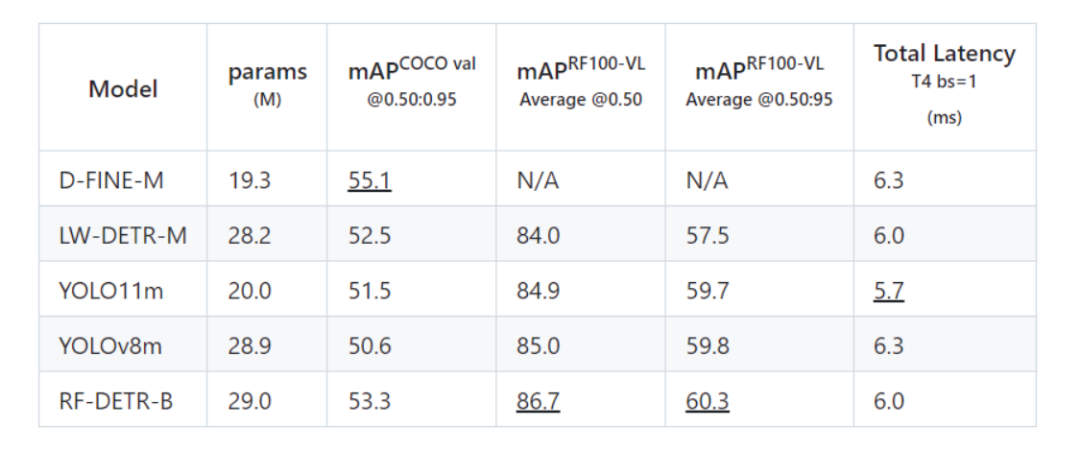
RF-DETR 在 Microsoft COCO 数据集上首次实现了超过 60% 的平均精度(mAP),并且在 RF100-VL 基准测试中平均精度达到 86.7%,超越了其他主流模型如 YOLOv11 和 LW-DETR。同时,RF-DETR 保持了实时性,例如 RF-DETR-Base 在 NVIDIA T4 GPU 上可以达到 160 FPS。
(二)强大的领域适应性
RF-DETR 能够很好地适应各种领域和不同大小的数据集,包括但不限于航拍图像、工业场景、自然环境等。这使得 RF-DETR 不仅适用于常见的物体识别场景,还能在更专业的领域表现出色。
(三)灵活的分辨率选择
RF-DETR 支持多分辨率训练和运行,用户可以根据实际需求在精度和延迟之间进行权衡。这种灵活性使得 RF-DETR 能够在不同的硬件平台上实现最优性能。
(四)便捷的微调和部署
RF-DETR 提供预训练的检查点,用户可以在自定义数据集上进行微调,快速适应特定任务。此外,RF-DETR 的模型参数超小,便于部署在资源受限的硬件上。(RF-DETR-base(2900 万参数)和 RF-DETR-large(1.28 亿参数))
四、性能表现
(一)COCO 数据集
在 Microsoft COCO 数据集上,RF-DETR 实现了超过 60% 的平均精度(mAP),这是实时目标检测模型中的一个重要突破。与 YOLO 系列模型相比,RF-DETR 在精度上有了显著提升。
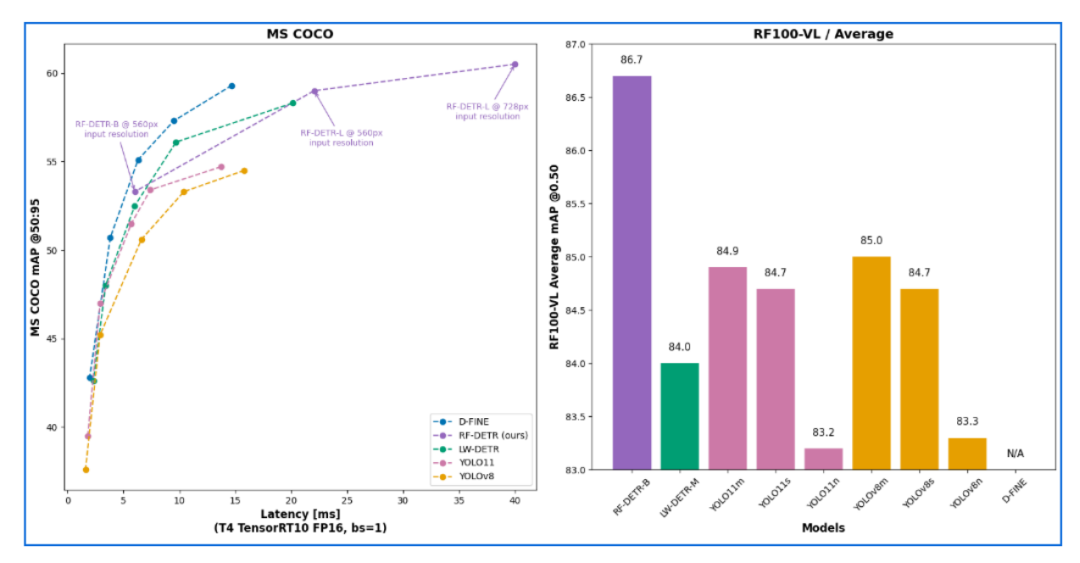
(二)RF100-VL 基准测试
在 RF100-VL 基准测试中,RF-DETR 的平均精度达到 86.7%,超越了其他主流模型。这表明 RF-DETR 在处理各种不同领域的数据集时具有强大的适应能力。
(三)实时性
RF-DETR-Base 在 NVIDIA T4 GPU 上可以达到 160 FPS,这使得它能够满足实时应用的需求。在实际应用中,RF-DETR 的低延迟特性可以显著提高系统的响应速度。
五、应用场景
(一)自动驾驶
在自动驾驶领域,RF-DETR 可以实时检测道路上的车辆、行人、交通标志和道路标线等目标。其高精度和低延迟特性使得自动驾驶系统能够快速准确地感知周围环境,从而做出合理的驾驶决策。例如,RF-DETR 可以帮助自动驾驶汽车在复杂的交通场景中,及时发现突然出现的行人或车辆,避免碰撞事故的发生,提高行车安全性和可靠性。
(二)工业质检
工业生产中,产品质量的检测至关重要。RF-DETR 可以用于检测产品表面的缺陷、零部件的完整性以及装配的准确性等。例如,在电子制造行业,RF-DETR 可以快速检测电路板上的元件是否安装正确,有无缺失或损坏;在汽车制造领域,它可以检查汽车零部件的尺寸和形状是否符合标准,确保产品质量的一致性和稳定性,提高生产效率和降低成本。
(三)安防监控
RF-DETR 在安防监控领域具有重要应用价值。它可以实时分析监控视频,自动检测异常行为和事件,如人员闯入禁止区域、盗窃行为、火灾烟雾等。一旦发现异常情况,系统能够迅速发出警报,通知相关人员进行处理,提高安防监控的效率和响应速度,有效保障人员和财产的安全。
(四)边缘设备
RF-DETR 的模型非常小,适合部署在资源受限的边缘设备上,如无人机、机器人、智能摄像头等。在无人机应用中,RF-DETR 可以帮助无人机实时感知周围环境,避障导航,同时对地面目标进行识别和跟踪;在机器人领域,它可以为机器人提供视觉感知能力,使其能够更好地与人类和环境进行交互,完成各种任务。
六、在线体验
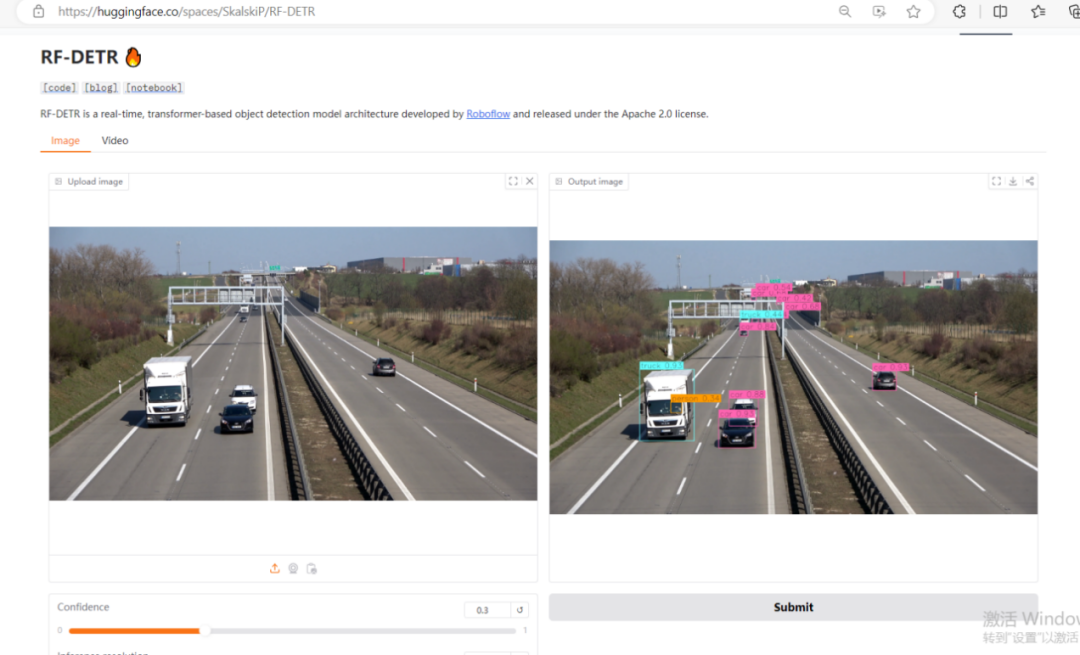
官方提供了在线体验页面,访问下面地址上传图片或者视频,即可实时看到目标检测结果,直观领略 RF-DETR 。
体验地址:https://huggingface.co/spaces/SkalskiP/RF-DETR
七、本地推理
(一)安装相关依赖
在 Python>=3.9 环境中安装 rfdetr 包,安装命令如下:
pip install rfdetr也可以使用‘pip install git+https://github.com/roboflow/rf-detr.git’安装最新版
(二)图片推理示例
RF-DETR 自带在 Microsoft COCO 数据集上预训练的检查点;以下是一个使用 RF-DETR 进行图像推理的示例:
import ioimport requestsimport supervision as svfrom PIL import Imagefrom rfdetr import RFDETRBasefrom rfdetr.util.coco_classes import COCO_CLASSESmodel = RFDETRBase()url = "https://media.roboflow.com/notebooks/examples/dog-2.jpeg"image = Image.open(io.BytesIO(requests.get(url).content))detections = model.predict(image, threshold=0.5)labels = [f"{COCO_CLASSES[class_id]} {confidence:.2f}"for class_id, confidencein zip(detections.class_id, detections.confidence)]annotated_image = image.copy()annotated_image = sv.BoxAnnotator().annotate(annotated_image, detections)annotated_image = sv.LabelAnnotator().annotate(annotated_image, detections, labels)sv.plot_image(annotated_image)
(三)视频推理示例
import supervision as svfrom rfdetr import RFDETRBasefrom rfdetr.util.coco_classes import COCO_CLASSESmodel = RFDETRBase()def callback(frame, index):detections = model.predict(frame, threshold=0.5)labels = [f"{COCO_CLASSES[class_id]} {confidence:.2f}"for class_id, confidencein zip(detections.class_id, detections.confidence)]annotated_frame = frame.copy()annotated_frame = sv.BoxAnnotator().annotate(annotated_frame, detections)annotated_frame = sv.LabelAnnotator().annotate(annotated_frame, detections, labels)return annotated_frameprocess_video(source_path=<SOURCE_VIDEO_PATH>,target_path=<TARGET_VIDEO_PATH>,callback=callback)
(四)网络摄像头推理
import cv2import supervision as svfrom rfdetr import RFDETRBasefrom rfdetr.util.coco_classes import COCO_CLASSESmodel = RFDETRBase()cap = cv2.VideoCapture(0)while True:success, frame = cap.read()if not success:breakdetections = model.predict(frame, threshold=0.5)labels = [f"{COCO_CLASSES[class_id]} {confidence:.2f}"for class_id, confidencein zip(detections.class_id, detections.confidence)]annotated_frame = frame.copy()annotated_frame = sv.BoxAnnotator().annotate(annotated_frame, detections)annotated_frame = sv.LabelAnnotator().annotate(annotated_frame, detections, labels)cv2.imshow("Webcam", annotated_frame)if cv2.waitKey(1) & 0xFF == ord('q'):breakcap.release()cv2.destroyAllWindows()
八、结语
RF-DETR 是一款高性能的实时目标检测模型,它基于 Transformer 架构,结合了预训练的 DINOv2 主干网络,实现了高精度和低延迟的目标检测。RF-DETR 在多个基准测试中表现出色,适用于自动驾驶、工业质检、安防监控等多种应用场景。其开源的特性使得开发者可以自由使用和修改模型,以满足特定需求。RF-DETR 的出现为实时目标检测领域带来了新的突破,有望在未来的智能系统中发挥重要作用。
九、项目地址
官网地址:https://blog.roboflow.com/rf-detr
开源仓库:https://github.com/roboflow/rf-detr
在线地址:https://huggingface.co/spaces/SkalskiP/RF-DETR
(文:小兵的AI视界)