

近日,来自慕尼黑工业大学、帝国理工学院和意大利技术研究院的国际研究团队发表了一项重磅成果。他们开发出一种新型假肢控制系统,通过融合运动神经元解码和姿势协同作用,让假肢控制更接近自然人手。这项突破性研究发表在机器人领域学术顶刊Science Robotics上。
▍软体假肢手技术创新:神经协同控制实现精准多指动作
研究团队开发的这款软体假肢手,采用双自由度设计,能在二维线性空间中实现丰富的手部姿态。最关键的创新在于他们开发的实时解码系统,能将神经协同信号直接转化为假肢的连续控制指令。
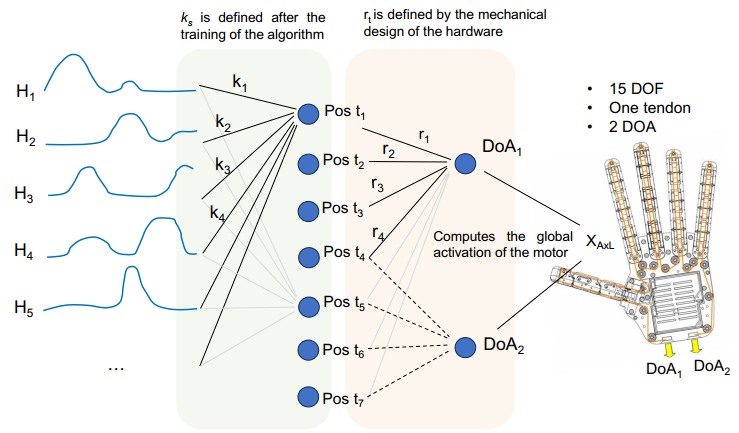
系统核心是SoftHand Pro-2假手,每个肌腱由一个自由度驱动,两个电机协同工作控制所有关节,实现灵活的手部动作。通过精心设计的控制算法,假手不仅能完成基础抓取,还能通过手指的顺逆时针旋转对物体施加不同接触力。
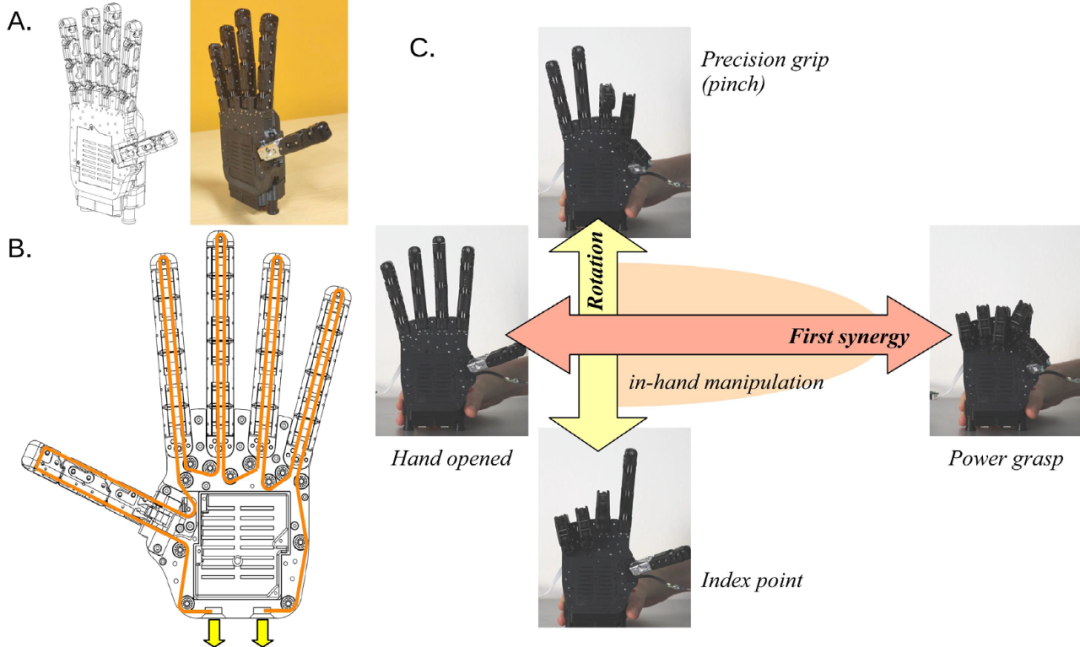
SoftHand Pro-2 的机械系统和硬件描述
研究团队招募了11名健康志愿者和3名假肢使用者进行严格测试。结果显示,这套系统能精确控制多指协调动作,覆盖了超过90%的机械运动范围。
特别值得一提的是,在目标手势测试中,基于神经协同的控制方式展现出显著优势。假肢使用者采用神经协同控制时,目标命中率高达82.5%,远超使用传统肌肉协同控制时的35.0%。健康受试者的测试也呈现类似趋势,神经协同控制的命中率为79.5%,而肌肉协同控制为54.5%。
整个系统的信号处理链条非常精密。首先通过192通道高分辨率表面肌电信号(HD-sEMG)采集用户意图,然后解码出运动神经元单元(MU)的放电活动。研究人员使用非负矩阵分解(NMF)算法提取协同特征,建立起神经信号到假肢控制的映射关系。
系统的离线分析格外严谨。团队深入研究了协同效应的数量和可变性,通过R2曲线和均方误差(MSE)等指标进行评估。他们还比较了运动神经元协同(MNS)和肌肉协同(MS)在不同传感器配置下的表现,从12个双极到192个单极进行了全面测试。
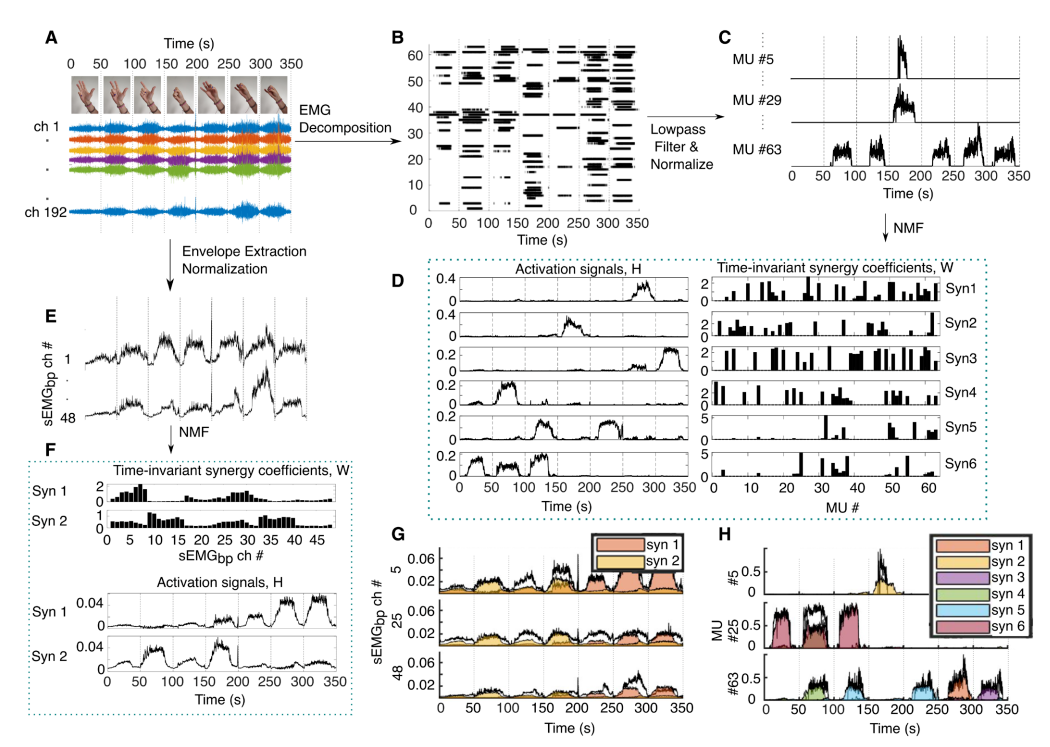
运动神经元和肌肉协同计算通道
▍实验验证与系统集成:神经协同控制假肢的精准与舒适
研究团队设计了一套严谨的实验方案,包括离线和在线两个阶段。在线实验中,参与者需要完成Center-Out目标到达任务,这为评估系统性能提供了标准化的测试平台。
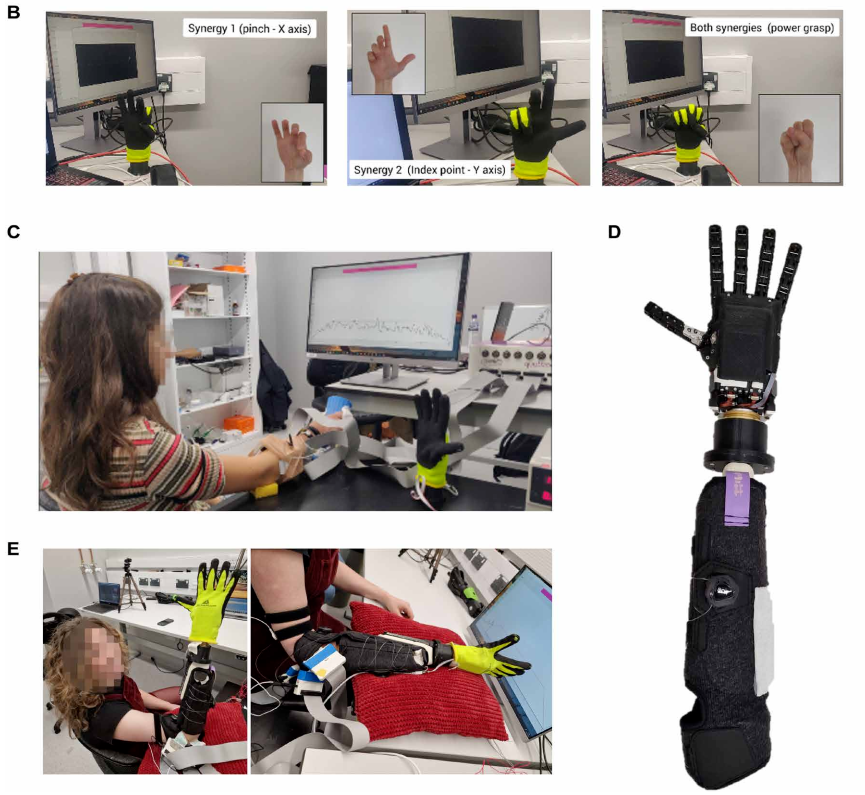
离线和在线实验方案
在可控工作空间方面,研究显示超过6名参与者能够到达深蓝色区域内的所有测试点,证明系统具有优秀的控制精度。通过小提琴图分析数据分布,研究团队发现基于神经协同的控制在执行时间、轨迹平滑度等关键指标上都优于传统方法。
系统采用了创新的矩阵映射方法,将协同激活矩阵(HS×L)与训练姿势(PT×L)关联,再通过转换矩阵(KT×S)实现到假肢的精确控制。这种数学框架让系统能在二维工作空间中实现流畅的连续控制。
整套系统的硬件集成也很巧妙。研究团队将HD-sEMG传感器优化配置在软质插座上,与柔软的多协同假手完美结合。这种设计不仅保证了信号采集的稳定性,还提供了良好的佩戴舒适度。
实验中使用了七种标准手部姿势作为测试基准,这些姿势覆盖了日常生活中最常用的手部动作。系统能够从规定的手部协同效应出发,通过神经信号解码,最终实现这些复杂姿势的精确重现。
MN或肌肉协同作用的激活信号图,以控制姿势协同作用的假手
▍未来展望:神经协同控制假肢技术的挑战与机遇
尽管取得了突破性进展,研究团队认为这项技术仍有提升空间。首要任务是验证神经协同信息在实验室外的实用性,毕竟真实世界的使用环境比实验室要复杂得多。
另一个重要研究方向是深入理解人类中枢神经系统(CNS)对运动神经元协同的灵活控制机制。这不仅有助于改进当前的控制算法,还可能为开发更智能的假肢控制系统提供理论基础。
研究团队特别指出,在机器人设备设计过程中,选择合适的规定性协同作用仍然是一个挑战。人类观察到的行为模式并不一定能直接反映神经系统的控制策略。因此,将神经科学知识与机器人工程相结合,仍然是未来研究的重点方向。
这项研究为下一代智能假肢开辟了新途径,展示了跨学科合作在解决复杂工程问题时的强大威力。相信随着技术的进一步发展,让假肢使用者获得更自然、更灵活的控制体验指日可待。
相关视频:
论文链接:
https://www.science.org/doi/10.1126/scirobotics.ado9509
(文:机器人大讲堂)
假肢又有新突破!科学机器人学又上一层楼!
这届科学家yyds!神经协同控制让假肢更接近自然人手了?这也太逆天了吧!