
Science Robotics新成果 多国团队联合打造自然仿生假肢接口
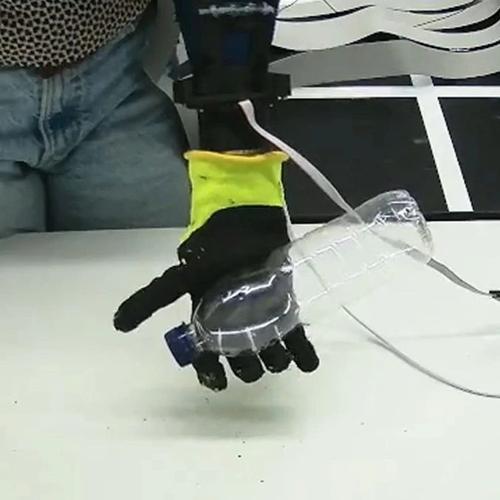
国际研究团队开发新型假肢控制系统,通过融合运动神经元解码和姿势协同作用,实现了更接近自然人手的控制。该系统采用双自由度设计,并使用非负矩阵分解(NMF)算法将神经信号转化为假肢控制指令。研究成果发表在《Science Robotics》上。
国际研究团队开发新型假肢控制系统,通过融合运动神经元解码和姿势协同作用,实现了更接近自然人手的控制。该系统采用双自由度设计,并使用非负矩阵分解(NMF)算法将神经信号转化为假肢控制指令。研究成果发表在《Science Robotics》上。