
此前,在《2025我们离人形机器人量产还有多远?一文概览各企进度(上)》中,我们对国际上几家具有代表性的人形机器人企业的量产进度进行了梳理。而在《2025我们离人形机器人量产还有多远?一文概览各企进度(下篇·一)》中,我们也对国内部分企业的进展进行了盘点。然而,除了已提及的企业外,国内还有哪些人形机器人企业在推动量产?其具体进展如何?
接下来,和机器人大讲堂一起来深入了解国内其他人形机器人企业的研发动态与量产进度~
零次方机器人
零次方机器人核心团队主要来自清华大学AI&Robot智能机器人实验室,在机器人操作及运动控制领域具备深厚的技术积累,团队成员曾在T-RO、CoRL、ICRA、IROS等机器人领域顶级会议和期刊发表多篇学术论文。

在产品方面,零次方机器人已发布两款产品:面向工厂操作的具身机器人F1和双足人形机器人Z1。F1采用基于人类视频数据学习的算法,通过三维人体运动姿态感知模型提取人类关键关节运动数据,并将其映射到机器人身上,从而降低传统遥操作技术的学习成本。此外,F1通过4D高斯溅射技术重建观测信息,并利用Transformer-Based Diffusion Policy驱动机器人自主完成任务,使其具备向人类学习的能力。该技术路径结合仿真训练与强化学习,提升了机器人的操作灵活性与泛化能力,目标为实现超越人类专家效率的操作水平。目前,F1主要应用于专业工厂的专项操作,未来计划逐步拓展至家庭及通用场景。
Z1双足人形机器人配备最高150牛米的关节电机,全身具备27个自由度,载重测试极限达20公斤,负载/自重比超过70%。Z1采用自研的EtherCAT通讯模组,实现了低延时高带宽的系统性能。通过AI技术辅助设计机器人结构参数,Z1在能耗优化与动态运动性能方面表现突出。结合自研的物理交互世界模型算法,Z1展现出较强的抗干扰能力及复杂地形适应能力,能够在多种不规则路面和复杂工况下稳定行走。
在技术突破方面,零次方机器人已实现多项关键技术突破,包括机器人本体结构设计、拟人行走算法及多任务上肢操作等。通过AI辅助设计机器人结构参数,其产品在动态运动性能与能耗优化方面取得显著进展。自研的物理交互世界模型算法在运动控制领域表现突出,使机器人能够适应多种复杂工况,并在复杂环境下实现稳定盲走。
在商业化探索方面,零次方机器人计划于2025年在服务、教育、文娱、展览等多个领域实现商业化应用。
在融资方面,零次方机器人2025年总计进行了2轮融资,投资方包括合肥包河创投等机构。
在量产进程方面,据内部消息透露,零次方机器人已获得千万级订单,并预计于2025年完成500余台多型号人形机器人的量产目标。
卓益得
上海卓益得机器人有限公司(以下简称“卓益得”)成立于2021年5月,是一家专注于智能机器人产品研发和销售的企业,致力于为业界提供高机敏、高效率、高智能、低成本的通用人形机器人平台。卓益得前身可追溯至2016年成立的深圳市行者机器人技术有限公司,该企业起源深深植根于中德两国历史上规模最大的人工智能合作项目——“跨模态学习”,团队成员均在双足动态行走技术与跨模态学习研究领域超过二十年的深厚积累。

其创始人李清都教授系上海理工大学机器智能研究院执行院长,发表了70余篇SCI期刊论文,被引用1500余次。此前,他带领团队针对传统仿人机器人的高成本、复杂性、重量和低效问题进行了深入研究,最终在动态步行的原理和方法上取得关键突破,成功研制出全球能效最高、续航最远的“行者一号”步行平台(创造世界纪录),以及高能效、高智能、低成本的双足动态行走机器人小贝/BEISA。

在产品方面,卓益得此前已推出通用型双足人形机器人平台“行者一号”、通用人形机器人平台小贝系列和高仿真表情机器人Ulaa系列。其中,“行者一号”由李清都教授带领的团队研发,仅用0.8度电便可行走54小时,完成34万步。该机器人曾在2015年11月创下吉尼斯世界纪录,连续行走了134.03公里。

小贝系列机器人突破了传统仿人双足机器人的技术壁垒,提出了一种全新的被动行走模型。结合复杂系统建模理论、多模态认知方法、虚拟物理仿真和深度增强学习的人工智能训练方法,构建了“智能算法+智能传感器+新型机械结构”的体系化解决方案。因此,小贝系列机器人具有优秀的续航能力、平衡能力和负载能力,同时具备触觉、视觉、听觉、空间知觉等全方位的感知系统,是一款能够同时满足平衡、高效、智能、安全、经济五大特征的人形智能双足机器人。
高仿真表情机器人Ulaa则采用类人技术和表情模拟技术,具备真实的类人形态和高度写实的皮肤面孔,丰富的表情模拟能力和超出人类自由度的灵活双臂,可为新人工智能和机器学习技术提供可靠的硬件平台。

2024年,卓益得机器人相继推出两款新品:通用型双足人形机器人平台“行者二号”和Ulaa机器人系列新品翠花,两款产品的起售价均为16.98万元。其中,“行者二号”(X02Lite)是全球首款采用肌腱驱动技术的双足机器人,身高160厘米,体重28公斤,续航时间可达6小时。该产品在安全性和适应性方面达到家庭服务级别,其肌腱驱动技术使机器人能够承受自身重量3到4倍的负荷。应用场景涵盖商业服务、文旅表演、工业制造、科研教育及家庭服务等多个领域。

Ulaa机器人系列新品翠花则以其高度写实的皮肤与面孔为特点,具备较强的表情模拟能力。此外,翠花还拥有多模态感知与学习能力,是一款普适性可扩展平台,经过功能扩展后可应用于多种行业领域。

在融资方面,卓益得自成立以来总计进行了2轮融资,获得了点亮伯恩等投资机构的支持。
在量产进程方面,据相关消息,卓益得“行者二号”(X02Lite)机器人已经规模化量产。
众擎
深圳市众擎机器人科技有限公司(以下简称“众擎”)成立于2023年10月,专注于通用智能机器人及行业场景解决方案的研发与生产,产品涵盖人形机器人及相关领域。

众擎CEO赵同阳曾为小鹏鹏行机器人创始人,其创立的机器人公司于2020年被小鹏汽车收购,随后他与何小鹏共同成立深圳鹏行机器人。众擎核心团队也汇聚了中国第一批腿足机器人研究与产业落地领域的资深成员,同时吸引了来自UC Berkeley、清华大学、普渡大学、香港中文大学、北京理工大学、北京航空航天大学、东京大学等知名院校的具身智能与运控算法人才。

在产品方面,众擎于2024年7月发布了专业级大人形SA01 EDU版,10月发布了首款全尺寸人形机器人SE01 EDU版,同年12月推出轻量级、高动态、全开放通用具身智能体PM01。
SE01 EDU版主要面向科研与教育领域,售价为3.85万元。该机器人整机重量约40公斤,单腿具备6个自由度,膝关节最大扭矩为160 Nm,脚踝关节最大扭矩为96 Nm,支持单脚站立,关节速度最高可达28rad/s,能够完成奔跑、跳跃等动作。其采用强化学习算法架构与高效动力模组方案,行走功耗低于200W,动力性能与直膝仿人程度处于行业前列。

SE01则主要面向工业应用,身高170厘米,重约55公斤,关节最大扭矩为330N·m,整机共32个自由度,常态行走速度为2m/s,可完成上下蹲、俯卧撑、转圈走、抓取、跑跳等高难度动作。该产品采用自主研发的一体化谐波关节模组,结合强化学习与模仿学习运控方案,通过端到端神经网络模型实现了自然步态,显著提升了机器人的灵活性与拟人化程度。

PM01身高1.38米,体重约40公斤,全身24个自由度,移动速度为2m/s,腰部配备320度自由旋转电机,支持机械式步态与类人自然步态两种行走模式。通过光学动捕技术采集人体运动数据,结合强化学习与模仿学习,PM01在拟人化程度与复杂环境适应性方面表现优异。PM01提供商业版与教育版两个版本,自2024年12月发布至2025年3月31日,两款版本均以8.8万元的统一价格发售。此外,众擎还对外开放了PM01的基础操作代码,并提供训练代码与部署代码等内容。

在技术研发方面,众擎已实现从电机、减速器、控制伺服单元、扭力传感器到通信架构的全栈自研能力。目前,其研发设计的10款人形机器人专用关节可满足从四足到人形、从工业级到生活服务级的多样化需求。动力关节力控精度达到0.2牛米,谐波和行星旋转关节扭矩覆盖24牛米至360牛米,力控推杆方案推力范围从4千牛至1万2千牛。
在量产进程方面,众擎计划于2024年进一步完善大小人形系列产品研发,并力争在2025年实现年产销1000台以上人形机器人产品的目标。目前,其具体销售数据尚未公开,但产品的高性价比或为其市场拓展提供助力。
在融资方面,众擎2024年总计进行了2轮融资,投资方包括合肥包河创投、国香资本、浔商创投等机构。
星尘智能
星尘智能(深圳)有限公司(以下简称“星尘智能”)成立于2022年12月,是一家专注于研发“新一代最强AI机器人助理”的企业,致力于通过技术创新使机器人具备学习、思考和劳动的能力,能够与人流畅交互,使用人类工具和设备,完成复杂、枯燥或危险的任务,并拓展泛场景通用操作能力,推动“AI+机器人”技术的革新。
星尘智能创始人来杰在机器人领域拥有16年的研发经验,曾担任腾讯机器人实验室的首位员工,并在百度“小度机器人”团队担任负责人。他还曾在香港理工大学从事机器人相关研究,主导设计了多款创新型机器人,包括腾讯的轮腿式机器人Ollie。同时,星尘智能的核心团队也汇聚了来自腾讯、谷歌、优必选、百度和华为等科技企业的技术人才。

在产品方面,2024年4月,星尘智能展示了其自主研发的新一代AI机器人Astribot S1的重要进展,并于同年8月正式发布该产品。12月,Astribot S1开启预售。据悉,S1具备全能操作能力,能够完成食物制作、泡功夫茶、乐器演奏等高难度、长序列且可泛化的任务。
基于星尘智能自主研发的“Design for AI”软硬件一体化系统架构,Astribot S1将AI智能与操作能力深度融合,使机器人能够高度仿人化,具备学习、思考和劳动的能力。在AI智能方面,S1具备复杂环境中的感知、认知与实时决策能力,能够实现物体、任务和环境级别的通用操作泛化。在硬件方面,S1通过独特的刚柔耦合传动机构设计,实时监测力的传输,无需依赖轨迹估算,能够像人类一样通过感知力的大小精准控制输出,显著提升了操作精度。
在商业化探索方面,星尘智能已与全球具身智能领域的领先团队Physical Intelligence(PI)达成合作。2024年11月,星尘智能在社交媒体上发布了一段视频,展示了Astribot S1在PI具身模型加持下完成制作咖啡的全过程。视频中,S1能够根据指令找到咖啡胶囊、操作咖啡机、拿取咖啡并应对各类干扰,任务执行流畅。

在技术突破方面,星尘智能也已在具身智能数据获取方面取得关键进展。Astribot S1能够低成本利用真实世界视频数据和人体动作捕捉数据,并通过第一人称视角收集触觉、力觉、视觉、听觉等多维度高质量数据。这些数据的高效规模化训练降低了机器人数据采集成本和新任务的训练难度,提升了泛化能力的潜力。
在融资方面,星尘智能2024年总计进行了1轮融资,获得了经纬创投、云启资本、清辉投资等投资机构的支持。
在量产进程方面,星尘智能尚未对外披露更多信息
云深处科技
杭州云深处科技有限公司(以下简称“云深处科技”)成立于2017年11月,是具身智能创新技术与应用领域的引领者。秉持着通过机器人与人工智能技术创造更加美好生活的愿景,云深处科技自主研发出国际领先的工业级AI+足式机器人。这一创新成果已在多个行业实现落地应用,并创造了在中国率先实现四足机器人全自主巡检变电站的重大突破。

其创始人朱秋国,系浙江大学控制学院副教授、博士生导师,深耕仿人机器人、仿生机器人、机器智能等领域10余年。他曾承担国家重点研发项目、国家自然科学基金等项目10余项,发表学术论文40余篇,并荣获国家发明专利授权40余件,国际发明专利2件。

在产品方面,从国内首个完成自主导航和智能交互的四足机器人,到国内第一个荣登《Science Robotics》的四足机器人,再到服务于亚运村地下管廊隧道巡检工作。云深处科技自成立以来,始终致力于产品的迭代与创新。而在人形机器人方面,云深处科技也已于24年世界机器人大会上首次曝光了其首款全尺寸具身智能人形机器人DR01。

据了解,DR01搭载云深处自研的端到端强化学习算法和精确的状态估计技术,能够确保机器人在复杂环境中的鲁棒控制。在关节方面,DR01则采用了云深处自主研发的轻量级J60关节和大功率J100关节。
在技术研究方面,由朱秋国教授领衔的研究团队在2024年在arXiv平台发布了关于《面向鲁棒性人形机器人运动学习中的关键参数估计》论文,并早在几年前就深入参与双足人形机器人项目研发。拥有非常丰富的开发经验。
在融资方面,云深处科技自成立以来已总计完成7轮融资。2024年则共计进行了2轮融资,获得了华建函数投资、深智城集团、莫干山高新投资、邦盛资本等多家企业和投资机构的支持。
在量产进程方面,云深处科技目前暂时还未透露更多相关信息。
优宝特机器人
山东优宝特智能机器人有限公司(以下简称“优宝特机器人”)成立于2014年1月,是一家专注于腿足式仿生机器人、人形机器人、液压特种机器人等产品研发与创新的企业。
优宝特机器人的创始人兼CEO范永博士,毕业于中科院自动化所,拥有深厚的学术背景。他凭借前瞻性的行业视野和卓越的领导能力,为公司的发展方向提供了明确的指引。联合创始人兼首席科学家李贻斌教授,现任山东大学机器人研究中心主任,其卓越的科研成就为优宝特机器人的技术创新提供了坚实的支撑。另一位联合创始人兼研发总监荣学文研究员,同样来自山东大学机器人研究中心,他凭借丰富的研发经验和深厚的专业知识,在公司产品持续优化与迭代过程中发挥了重要作用。

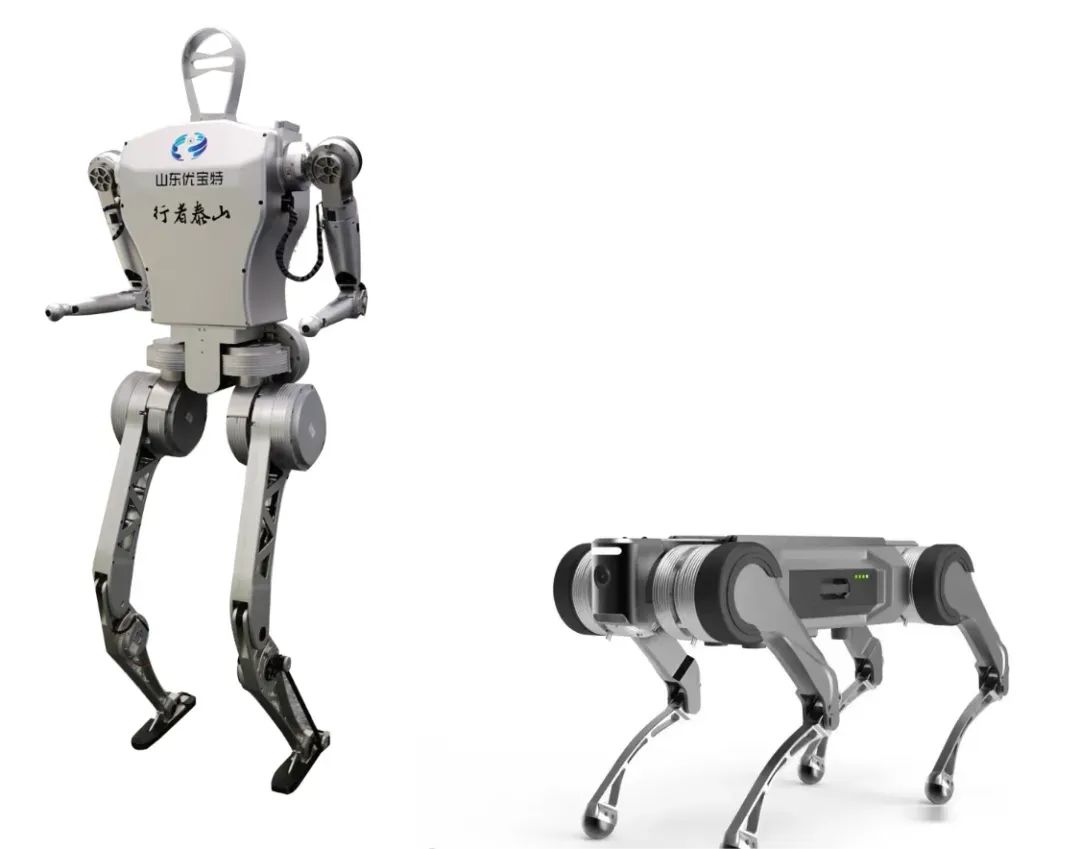
在产品方面,优宝特机器人此前已经成功开发出多款双足、四足、六足等腿足式仿生机器人及一系列机器人核心组件。值得一提的是,2024年1月9日,优宝特机器人开始了人形机器人的研发工作。仅在两个月零九天后,即3月18日,公司就成功开发出了人形机器人“行者泰山”。这一开发速度在业界创造了新纪录。“行者泰山”能够以7.2公里/小时的速度稳定奔跑,其性能已达到国内领先水平。未来,优宝特机器人计划将人形机器人与大模型相结合,利用大模型作为“大脑”进行任务规划与处理,进一步提升机器人的智能化水平。
此外,2024年12月,济南市科技局正式发布了2024年度市级科技计划“揭榜挂帅”拟立项支持的项目实施方案名单。其中,优宝特机器人发榜的“人形机器人控制技术及应用”项目成功获得立项支持。这一项目的立项,不仅体现了政府对优宝特机器人技术实力的认可,也为其未来的发展提供了有力的政策支持。
在融资方面,优宝特机器人2024年总计进行了2轮融资,获得了联想之星河济高控股的支持。
在量产进程方面,优宝特机器人目前尚未对外透露更多相关信息。
钛虎机器人
钛虎机器人科技(上海)有限公司(以下简称“钛虎机器人”)成立于2020年8月,是一家专注于机器人高端硬件与整体解决方案的高科技企业。公司聚焦下一代先进电驱动力单元的研发,为人形机器人、工业自动化、服务机器人、特种应用及未来交通出行等行业客户提供多系列标准型一体化关节、超轻量协作机器人以及人形机器人等硬件解决方案。
钛虎机器人创始人易港为“95后”,其核心团队在底层技术研发、产品创新及商业化落地等方面具备较强的行业经验。
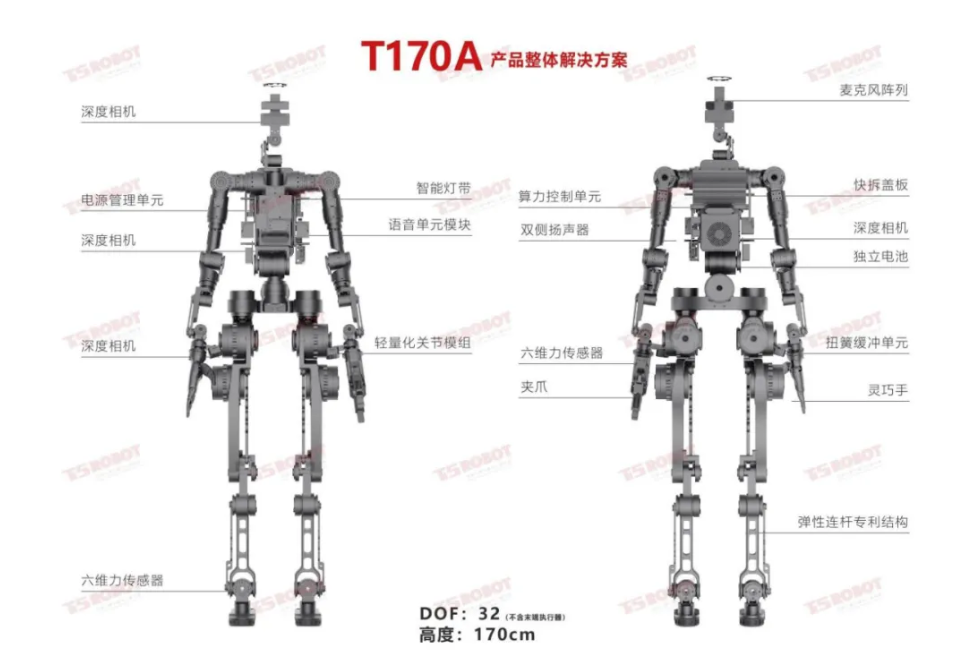
在产品方面,钛虎机器人此前已完成人形机器人柔性关节与末端执行器等核心零部件的研发与批量生产,能够为客户提供一站式核心零部件供应,涵盖人形机器人、协作机器人、主动式外骨骼机器人、一体化关节模组及智能仿生手等产品。在2024年世界人工智能大会(WAIC)上,钛虎机器人还发布了其最新研发成果——第二代人形机器人T170A实体“瑶光”与“墨翟”。
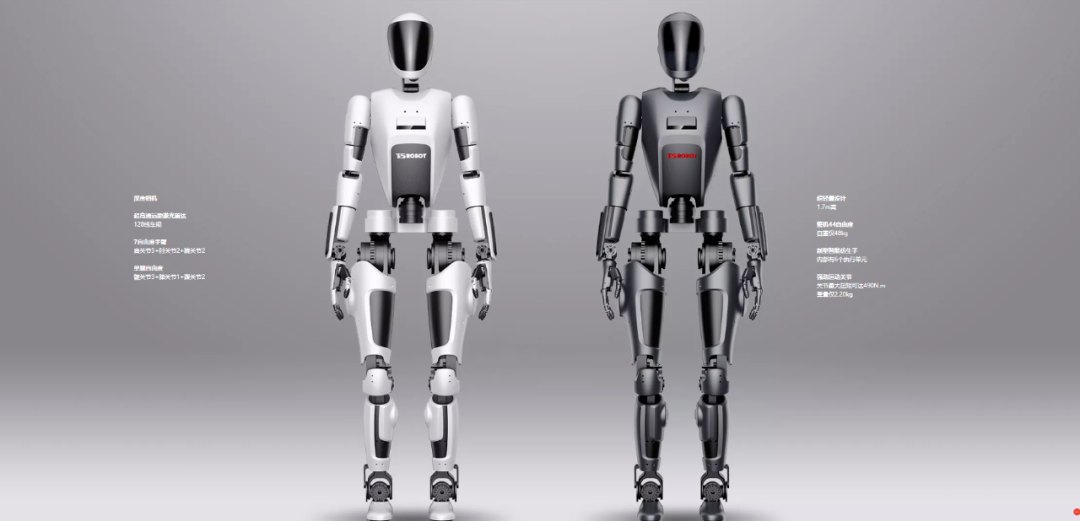
据悉, T170A人形机器人身高1.7米,采用钛虎科技自主研发的轻量化关节模组,整机自重48公斤,单手负载能力达5公斤,髋关节峰值扭矩为490牛米。机器人全身共设44个自由度,搭载英伟达Jetson AGX Orin 64GB高性能控制器,具备较高的操作灵活性与感知精度。此外,T170A配备了激光雷达和双目相机系统,增强了环境感知与避障能力。
在商业化探索方面,钛虎机器人已成为全球少数能够提供一体化关节、灵巧手、运动控制算法及人形机器人本体ODM等全套软硬件解决方案的企业之一。其产品在工业、商业、科研教育及医疗康复等领域得到应用,并与华为、国家电网、美的、大疆、追觅科技、小鹏汽车、上电科及深圳泰达机器人有限公司等十余家企业建立了合作关系。此外,钛虎机器人已成功进入某全球领先的海外机器人厂商供应链,为其提供核心关节及机械臂ODM服务。
在融资方面,钛虎机器人2024年总计进行了2轮融资,获得了梅花创投、方富创投、经纬创投、凡卓资本、国香资本等多家投资机构的支持。
关于人形机器人量产进程,钛虎机器人目前尚未对外披露更多相关信息。
戴盟机器人
戴盟(深圳)机器人科技有限公司(以下简称“戴盟机器人”)成立于2021年12月,孵化于香港科技大学,并于2023年8月正式投入运营。作为一家专注于触觉感知与通用智能机器人技术研发的企业,戴盟机器人致力于通过先进的硬件设计与算法结合,推动通用人工智能与机器人技术的深度融合,开发具备高智能与精细化操作能力的通用机器人。
戴盟机器人创始人兼CEO段江哗博士自2016年起在中国科学院-香港中文大学深圳先进集成技术研究所从事机器人操作学习研究。在创立戴盟机器人之前,他在香港科技大学专注于结合视觉、力觉和触觉的机器人操作算法研究,积累了丰富的学术与实践经验。此外,段江哗博士曾带领团队在世界机器人大赛及全球规模最大的机器人会议IROS抓取操作大赛中取得优异成绩,并以创业团队CTO身份获得清华大学清创集训营冠军。

联合创始人兼首席科学家王煜教授是国际机器人与灵巧操作领域的知名专家,长期从事触觉感知、仿生结构设计与机器人学习等前沿研究。他提出的“具身技能”与“技能克隆”概念,为触觉在精细操作机器人中的应用提供了新的研究方向。在加入戴盟机器人之前,王煜教授曾担任香港科技大学机器人研究院创始院长,目前担任IEEE机器人与自动化学会(RAS)理事会成员。

在产品方面,戴盟机器人此前已成功自主研发出全球最薄的“毫米级厚度”视触觉传感器,该传感器在1平方厘米的区域内布置了超过数万个感知单元,能够精准感知滑动、纹理和软硬度等触觉信息。与传统方案相比,戴盟的传感器在分辨率和灵敏度上具有显著优势。此外,戴盟通过创新性光学技术,将传感器厚度从几厘米缩小至几毫米,使其能够轻松部署在人类指尖大小的空间内。这一微型化设计不仅降低了灵巧手的手指厚度,还提高了机器人的灵活性和适应性,使其在精细任务中表现更加出色。

基于高分辨率触觉数据,戴盟机器人也构建了含触觉多模态操作模型。该模型首次将触觉模态信息与视觉、语言、身体姿态等常规模态相结合,使机器人能够更全面地感知周围环境,并实时生成符合实际情况的反应动作。触觉的加入不仅提升了机器人的决策能力和自主性,还显著降低了训练数据的需求。

2024年3月,戴盟机器人发布了首款人形机器人Sparky 1。该机器人重55公斤,身高可在175至190厘米间调节,操作范围覆盖0至220厘米,拥有33个自由度。其单臂伸展长度达70厘米,单臂最大负载5公斤,双臂合计可承载10公斤,极限承重能力为75公斤,上身可弯曲至90度,最大移动速度为每小时14.5公里,能够跨越3.5厘米高的障碍物,充电1小时可持续工作8小时。Sparky 1具备275TOPS的边缘计算能力,融合了最新的AGI(通用人工智能)技术与LLM(大型语言模型),集成了自主学习、问题解决策略及跨领域知识迁移与情境理解能力,能够适应并高效完成多种复杂任务。

为提升数据采集效率和质量,戴盟机器人还开发了一套高效、低成本的数据采集系统,能够同时采集视觉、触觉与动作数据。这些多样化数据为模型训练提供了丰富的场景,增强了其泛化能力和对新环境的适应性。
在技术突破方面,触觉感知能够帮助机器人更准确地理解物体的形状、硬度等属性,并实时调整抓取力度和操作方式。戴盟机器人通过研发具身智能“触觉感知”技术,弥补了视觉感知的不足,该技术不仅增强了机器人与物理世界的交互能力,还为其在复杂任务中的自主决策提供了重要支持。
在融资方面,戴盟机器人已完成两轮融资,投资方包括昆仲资本、联想创投、招银国际、国中投资等机构。
在量产进程方面,戴盟机器人的光学触觉传感器已实现小批量量产并投入应用,目前正推动该传感器的大规模量产。关于人形机器人产品的量产信息,该公司尚未对外披露。
月泉仿生
北京达奇月泉仿生科技有限公司(以下简称“月泉仿生”)成立于2022年11月,是一家人形机器人本体、核心零部件及仿生智能装备的创新型研发企业。目前,月泉仿生核心业务核心业务囊括了仿生运动智能、健康仿生系统与相关装备,以及仿人机器人技术的研发和推广。

其创始人任露泉系中国科学院院士、吉林大学教授、国际仿生工程学会名誉理事长。联合创始人任雷则身兼英国曼彻斯特大学终身教授、国家特聘专家、教育部长江学者、吉林大学教授、国际仿生工程学会常务副理事长等多重身份。他曾在国际上率先提出了仿生拉压体机器人原理与技术,并在国家自然基金重点和重大项目支持下,成功研发出低能耗仿生类人行走、仿生拉压体灵巧手以及类人机械臂等设计制造原理与技术。

在产品方面,以任雷教授提出的“仿生拉压体机器人理论与技术体系”为基础,月泉仿生致力于开发高度仿生的人形机器人整机。目前,月泉仿生已成功开发仿生拉压体灵巧手、仿生拉压体机械臂的等产品,并自研了核心关节执行器。据公司内部消息透露,月泉仿生自主研发的初步版本的仿生下肢行走机器人样机已经完成,并在实验室环境中进行了行走演示。在25年,月券仿生预计将研发并组装完成一款新一代的高度仿生人形机器人整机,这款机器人将基于月泉仿生的仿生拉压体技术体系进行打造,有望为行业带来新的飞跃。
在技术突破方面,月泉仿生已以仿生拉压体机器人理论与技术为基础,月泉仿生已开发了200多个国际和国内专利,形成了“技术树”。
在商业化探索方面,自2023年6月投入商业运营以来,月泉仿生旗下的相关技术产品已经成功签订了接近千万元的商业化订单。展望未来,月泉仿生不仅计划在人形机器人的整机技术领域进行战略布局,同时也将致力于成为该行业的核心部件和关键技术供应商,推动整个行业的创新与进步。
在融资方面,月泉仿生2024年总计进行了2轮融资,获得了梅花创投、长兴基金、洪泰基金、北科众发展启航创业投资基金等投资机构的支持。
星海图
星海图(北京)人工智能科技有限公司(以下简称“星海图”)成立于2023年9月,是一家立足中国、放眼全球的具身智能公司。以让具身智能体服务人类世界为使命,星海图致力于实现部署100亿台智能体,为100亿全球人口提供服务的宏伟愿景。

其创始团队包括高继扬、赵行、许华哲和李天威。其中,高继扬、赵行、许华哲三位均出身于清华大学,而李天威则是UCL的硕士毕业生。

在产品方面,星海图此前已推出矢量控制底盘X1和起售价为3.98万元的准直驱电机超轻型机械臂A1。基于这两款产品,星海图进一步开发了全尺寸轮足双臂仿人形机器人R1,并于2025年1月正式对外发布R1系列。据悉,R1系列包括R1、R1 Pro和R1 Lite三款产品,起售价为19.9万元,全系均标配英伟达Jetson AGX Orin 32GB平台,并搭载8核CPU和200 TOPS GPU计算能力。其中,R1和R1 Pro定位为仿人形通用机器人,R1 Lite则专注于数据采集功能,是一款双臂移动平台。

R1的高度约为1700毫米,宽度约为675毫米,全身配备24个自由度,单臂拥有6个自由度,最大臂展为70厘米,最大负载能力为3.5公斤。其底盘具备6个自由度,移动速度为1.5米/秒,垂直工作空间范围为0至2米,支持全向移动,可在多空间、多层级环境下灵活作业,能够灵活应对全场景、全地形、全空间的挑战,高效执行如搬运、拾取、开关门、按钮操作等多种任务。R1 Pro与R1的主要区别在于单臂自由度,R1 Pro的单臂自由度为7个,最大臂展为64.4厘米。R1 Lite作为数据采集平台,专注于双臂移动功能,适用于特定场景的数据收集任务。整体来看,R1系列的发布标志着星海图在仿人形机器人领域的技术布局进一步完善。
在商业化探索方面,星海图R1 系列具身智能本体已于1月正式入驻国地中心具身智能训练场。
在融资方面,星海图2024年总计进行了3轮融资,获得了高瓴创投(GL Ventures)、蚂蚁集团领投,米哈游、无锡创投集团、同歌创投、Funplus、IDG资本、BV百度风投、无限基金SEE FUND、金沙江创投、七熹投资等多家企业和投资机构的支持。
在量产进程方面,星海图目前暂时还未对外透露更多相关信息。
后续将更新更多企业量产进度,欢迎持续关注……
(文:机器人大讲堂)