
还记得几年前这个装着活体大鼠肌肉的萌萌机械手指吗?
现在,它不仅升级成了人类肌肉,还来了个惊人的”长大”操作 —— 直接进化到18厘米!
要知道,这种把活体组织和机械结构结合的生物混合(biohybrid)机器人,可一直都是“迷你派”。
为啥?简单说就是人工培养的肌肉一旦做大,内部细胞就会因为”断粮”而扑街。1厘米左右,就是它们的“生存极限”。
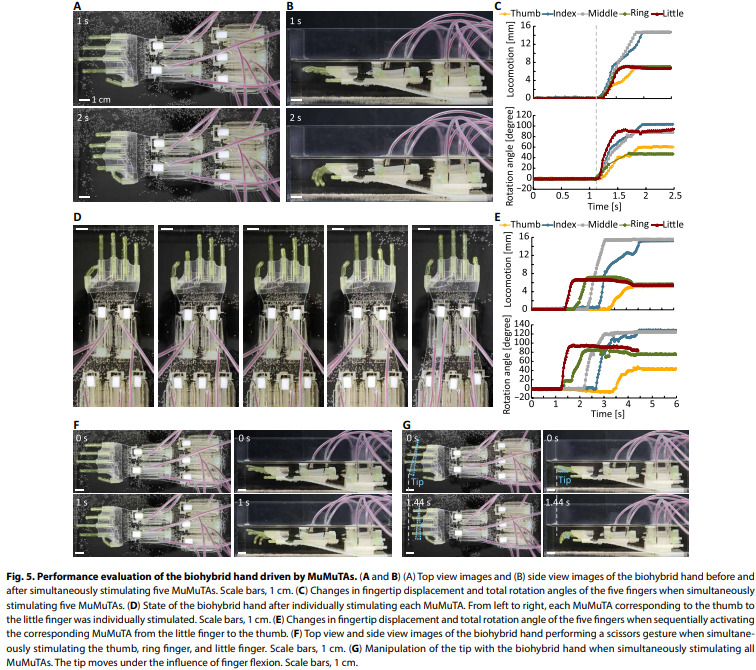
这次,东京大学团队不仅突破了尺寸天花板,还给这只仿生手装上了树脂骨骼,模拟人类手指的结构和功能来控制机械臂关节,实现了五指独立精准控制。
这项突破性成果有多硬核?直接登上了Science Robotics的最新封面,这份含金量,懂的都懂~
▍「寿司卷」神操作!8根人肌组织打造超级驱动器
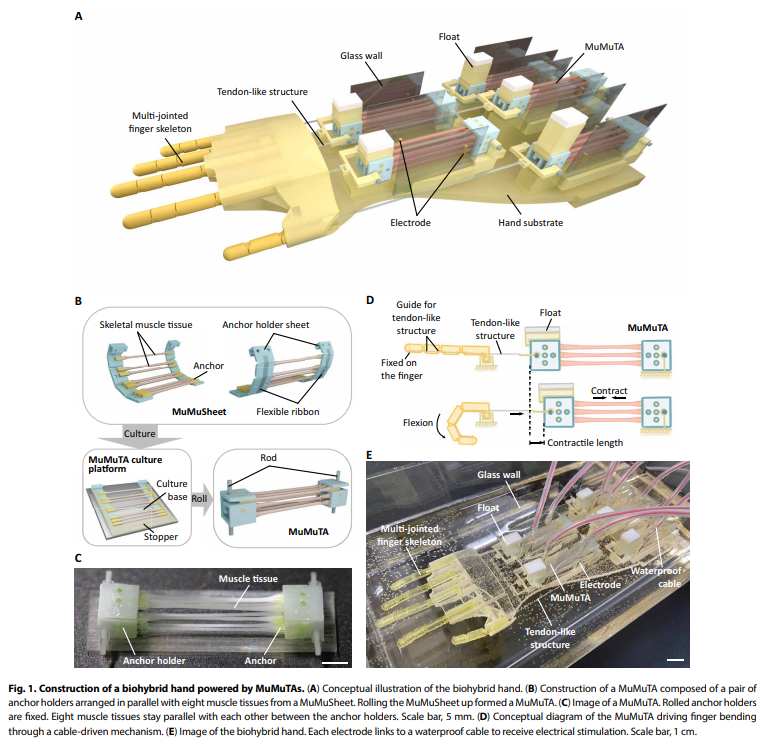
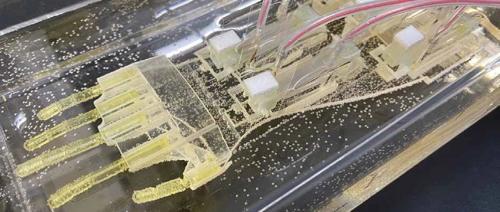
研究团队的核心创新在于发明了一种叫做MuMuTA的新型驱动器。它的制作过程居然和卷寿司异曲同工。
首先,研究人员将8根细长的人类肌肉组织排成一排,形成一个叫做MuMuSheet的片状结构。然后像卷寿司一样,将其卷成圆柱形,最后用两根特制固定棒固定形状。
为什么要这么做?前面提到,较粗的肌肉组织容易因为营养和氧气供应不足而坏死。而这种“寿司卷”式设计让每根肌肉都能获得充足的营养,表现出更强的收缩力。
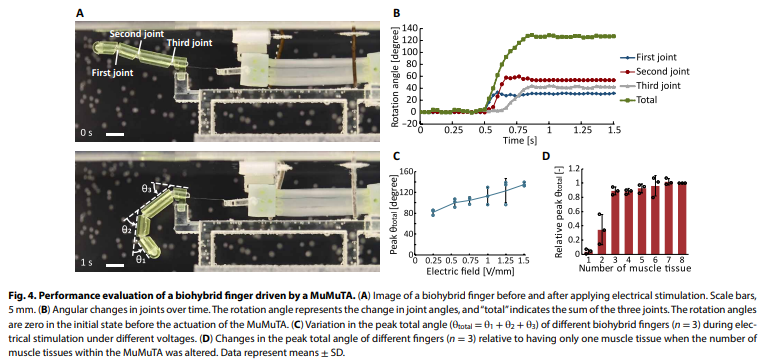
数据显示,一个MuMuTA驱动器能产生约8毫牛顿的收缩力和4毫米的收缩距离。通过类似人体肌腱的传动系统,就能将这种线性运动转化为手指的弯曲。
这只生物手最让人惊艳的是它的控制精度。每根手指都配备了独立的MuMuTA驱动器,通过电刺激就能让对应的手指弯曲。
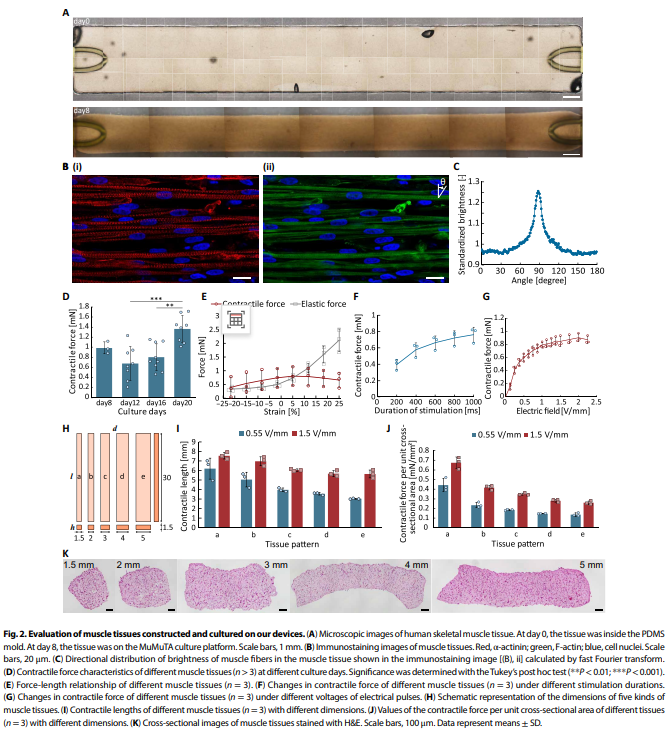
研究团队发现,电刺激参数对肌肉收缩有显著影响。当电场强度达到1.5V/mm、脉冲持续时间为600ms时,收缩力达到最大。
为了防止电刺激串扰,研究人员在每个驱动器两侧都安装了“玻璃墙”。这个看似简单的设计却很巧妙,有效限制了电场的扩散。
实验结果相当惊人:单个手指关节的最大转动速度能达到500度/秒,三个关节的总转动角度可达130度。而且连续刺激30分钟后,驱动器依然能保持最大收缩力!
▍8天速成,178天寿命,活体机械臂如何打造?
最让人意外的是培养周期。研究团队发现,培养仅8天的肌肉组织就能达到相当好的收缩性能!
通过免疫荧光染色,研究人员看到了这样的画面:培养8天后的肌肉组织中,α-actinin和actin已经形成了清晰的条纹状分布,说明肌肉细胞已经形成了成熟的收缩单元。
更厉害的是它的环境适应能力。在室温(26℃)环境下,这些肌肉组织依然能保持与37℃时相近的收缩力。虽然在4℃时收缩力会降低一半,但这已经相当耐造了!
那么,这些肌肉组织是怎么”长”出来的呢?
当然不是磨刀霍霍向人体,研究团队使用了经过预筛选的人体骨骼肌细胞,配上了一份”秘制配方”:Matrigel、培养基、纤维蛋白原、凝血酶等成分组成的特制水凝胶。这种配方为细胞提供了类似体内的生长环境。
有趣的是,这些体外培养的肌肉组织表现出了和真实肌肉惊人的相似性。比如,当被拉伸到原长度的5%时会产生最大收缩力;电刺激的效果也和真实肌肉一样,在600毫秒和1.5V/mm时达到饱和。
活体肌肉性能好,但真正用到机器人上,就面临这个一个非常现实的问题:这些肌肉组织能持续工作多久?
这项新研究的答案是:“长达”178天!
虽然收缩力会随时间逐渐降低,但基本功能依然保持。这几乎相当于给机器手装上了一个超长效的”生物电池”。
研究团队还对比了两种培养方法:一种是先将肌肉组织培养成片状,使用时再卷起来(”in-sheet”培养);另一种是直接将卷起的肌肉组织进行培养(”in-bundle”培养)。
结果显示,“in-sheet”培养方法完胜!原因也很简单:平铺状态下每根肌肉组织都能获得均匀的营养和氧气供应。相比之下,卷起状态培养时,内层的肌肉组织因为氧气浓度降低而表现欠佳。
此外,研究人员还发现了一个有趣的现象:当MuMuTA中的肌肉组织数量达到3根以上时,手指就能达到接近最大的弯曲角度。这说明不是肌肉组织越多越好,找到最佳平衡点才是关键。
▍加上人造肌腱,未来要怎样进化?
说完了”肌肉”,咱们来看看”骨骼”。研究团队在机械结构上也是下足了功夫。
他们采用了中空的指骨结构,内部设有专门的导轨用于固定”人造肌腱”。这种设计不仅让整个手指轻巧灵活,传动效率也大大提高。每个关节都能实现精准控制,这在生物混合机器人领域可是开创性的突破!
目前,研究团队也很坦诚地指出了几个待解决的问题。
最大的挑战是手指的”回弹“问题。目前手指回到初始位置主要靠浮力,这显然限制了连续动作的实现。对此,研究人员提出了两个解决方案:
-
引入适当的弹性材料作为回复机制
-
像真人手指一样添加”伸肌”,也就是在手指背面安装额外的MuMuTA
这项技术最令人期待的,或许是它在药物测试领域的应用前景。
因为使用了人源性成肌细胞,这个系统天然就是一个理想的药物测试平台。只要监测肌肉收缩力的变化,就能直观评估药物效果。这相比传统的体外测试方法具有优势!
研究团队表示,通过进一步改进,这项技术还能实现更复杂的动作。比如:
-
改用球形关节,让手指获得侧向运动能力
-
添加生长因子和物理训练,进一步提升肌肉组织的收缩性能
也许未来,这只由人类肌肉驱动的仿生手还能进化出更多”神操作”。
如果你对这项研究感兴趣,可以前往Science Robotics查看原文:
https://www.science.org/doi/10.1126/scirobotics.adr5512
(文:机器人大讲堂)