跳至内容
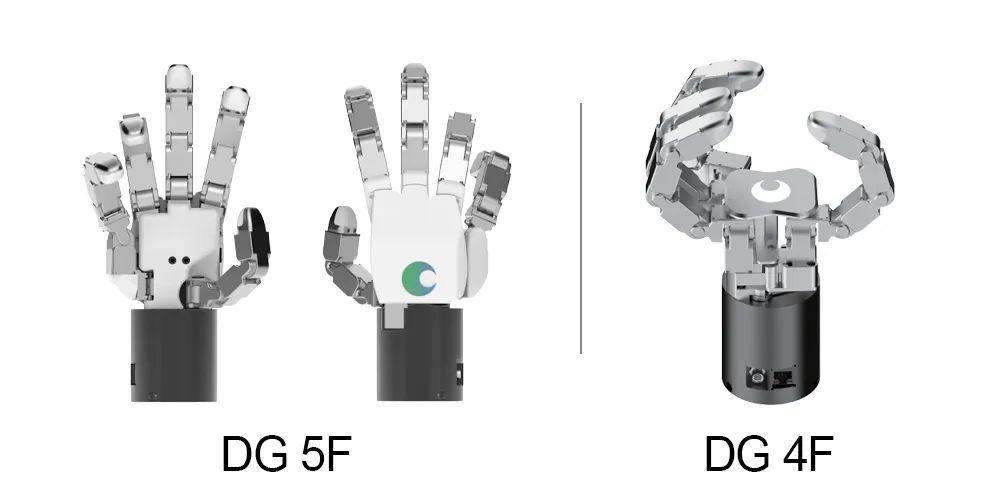
韩国机器人技术公司Tesollo近日发布了最新研发的五指仿人机械手Delto Gripper-5 Finger(DG-5F),该产品拥有20个独立自由度(DoF)、仿生关节设计及轻量化结构,并首次针对人形机器人双臂协同操作场景进行优化。据悉,该产品将于2025年3月正式上市销售。
Tesollo公司于2018年创立,专注于机器人灵巧手领域的技术开发,产品线涵盖两指至五指夹爪,服务于工业装配、物流搬运、科研教育等多个场景。其代表性产品DG-3F(三指灵巧手)凭借钛合金关节、12自由度控制及5公斤负载能力,已在精密制造领域占据一席之地。此次推出的DG-5F,是公司首次将目标市场明确指向人形机器人领域,面向双臂协作中的方向适配难题。
Tesollo DG-5F的每个手指配备4个独立关节,整只手拥有20个自由度,与人手关节数量接近。其拇指设计支持多向活动,进一步增加抓握复杂物体的能力。例如,在抓取圆柱体时,拇指与其他四指可形成包覆式握持,相比传统四指夹爪,适应性更好。
DG-5F整机重量仅1.4公斤,但配备7公斤的抓握力,该性能指标远超同类产品(如Sarcomere的ARTUS Lite五指手负载为5公斤)。轻量化得益于钛合金关节与碳纤维骨架的复合应用,既保证了强度,又降低了惯性对运动精度的影响。
此外Tesollo DG-5F内置自适应抓取算法,可识别物体形状与材质,动态调整抓取力度。例如,抓取易碎品时,算法会降低电流输出以避免损坏;搬运粗糙表面物体时,则增加摩擦力控制。此外,该五指灵巧手支持Modbus RTU/TCP协议,能够无缝接入工厂自动化系统,实现远程监控与实时反馈。
当前人形机器人领域绝大部分采用单臂设计,机械手缺乏方向适配性,导致双臂协作时需频繁调整姿态。Tesollo DG-5F的左右手配置首次解决了这一问题。
Sarcomere ARTUS Lite:16独立自由度+4欠驱动自由度,强调远程操作能力,但负载较低。
Shadow Robot五指手:英国老牌企业产品,被NASA用于太空舱实验,但价格昂贵且依赖定制化集成。
QB SoftHand:单电机驱动五指结构,成本低但灵活性受限,多用于科研教育。
相比之下,Tesollo DG-5F在性价比、工业适配性及负载能力上形成差异化优势。目前Tesollo整计划通过开源部分控制接口,吸引开发者社区参与应用场景拓展。
首尔大学机器人实验室教授金在勋指出:“DG-5F的仿生设计是技术亮点,但人形机器人对触觉反馈的需求尚未被完全满足。若未来能集成如GelSight Mini的高分辨率触觉传感器,其应用场景将扩展至医疗护理等高风险领域。
行业分析师李敏智则认为:“Tesollo需警惕供应链风险。其钛合金关节依赖进口,若地缘政治波动导致材料短缺,可能影响产能。此外,5G机器人控制标准的碎片化也可能增加兼容性成本。
(文:机器人大讲堂)