


随着人工智能和机器人技术的飞速发展,人形机器人(Humanoid Robot)的研究逐渐成为热点。人形机器人不仅在工业自动化、服务机器人等实际应用中具有巨大潜力,也在学术研究中为探索智能体的感知、决策和行动提供了重要平台。斯坦福大学ALOHA团队开发的HumanPlus框架,通过从人类数据中学习复杂的自主技能,实现了人形机器人的高效控制和模仿学习,为这一领域带来了新的突破。本文将深入探讨HumanPlus的技术架构、主要功能、应用场景以及其在具身智能研究中的重要地位。
一、项目概述
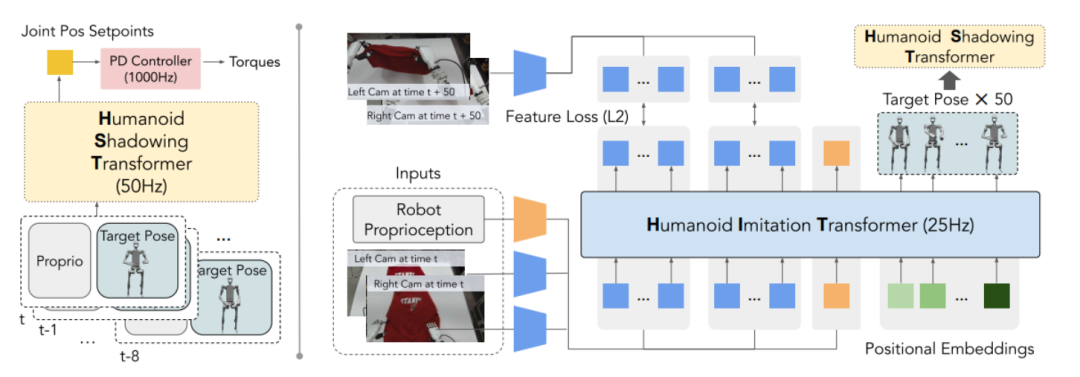
HumanPlus的核心目标是使人形机器人能够从人类数据中学习动作和自主技能。该系统包括两个主要部分:实时影子系统(Humanoid Shadowing Transformer,HST)和人形模仿Transformer(Humanoid Imitation Transformer,HIT)。HST用于实时全身控制人形机器人,而HIT则用于模仿学习,能够通过少量演示高效学习复杂的任务。HumanPlus通过结合HST和HIT,实现了从人类动作捕捉到机器人动作执行的端到端学习和控制。

二、技术架构
1. Humanoid Shadowing Transformer (HST)
-
低级控制策略:HST是一个低级控制策略,基于大量的模拟人体运动数据进行训练。它允许人类操作员使用单个RGB相机实时控制人形机器人。
-
数据集:HST的训练使用了AMASS数据集,该数据集包含40小时的多种任务的人体运动数据。通过将人类姿势重新定向为人形机器人姿势,HST能够在现实世界中零样本部署。
-
实时控制:HST通过实时处理人类操作员的姿势数据,将这些数据转换为机器人可以执行的动作命令,实现人形机器人的实时全身控制。
2. Humanoid Imitation Transformer (HIT)
-
高级模仿学习算法:HIT是一个高级模仿学习算法,用于从少量演示中学习复杂的任务。它基于双目视觉输入,能够预测人形机器人的目标姿态。
-
数据收集:HIT的训练使用了影子系统收集的现实世界数据,并结合了动作分块算法ACT,以实现高效的模仿学习。
-
任务学习:HIT能够通过少量演示(如40次)高效学习复杂的任务,如穿鞋、行走、打乒乓球等,展现出强大的泛化能力和学习效率。
3. 姿态估计
-
身体姿态估计:HumanPlus使用WHAM算法进行实时身体姿态估计,该算法能够准确捕捉人类操作员的身体动作,并将其转换为机器人可以理解的姿势数据。
-
手部姿态估计:使用HaMeR算法进行手部姿态估计,确保机器人手部动作的精确控制。
4.硬件代码
Unitree ROS2:HumanPlus的硬件代码基于Unitree ROS2,适用于与真实机器人的交互。这使得HumanPlus能够与多种人形机器人平台进行无缝对接和控制。
三、主要功能
1. 实时全身控制
通过HST,人类操作员可以使用单个RGB相机实时控制人形机器人,使其能够模仿人类的动作。这种实时控制能力使得人形机器人能够快速响应人类操作员的指令,实现复杂的动作执行。
2. 高效模仿学习
HIT能够通过少量演示高效学习复杂的任务,如穿鞋、行走、打乒乓球等。这种高效的学习能力使得人形机器人能够快速掌握新任务,适应不同的工作环境和需求。
3. 跨任务泛化
HumanPlus能够将从一个任务中学到的技能迁移到其他任务中,展现出良好的泛化能力。这意味着人形机器人不仅能够完成特定任务,还能够在类似任务中应用已学技能,提高任务执行的灵活性和效率。
4. 零样本部署
HST通过将人类姿势重新定向为人形机器人姿势,能够在现实世界中零样本部署。这大大减少了机器人在新环境中的适应时间和训练成本,提高了其实用性和部署效率。
四、技术优势
1. 高效学习能力
HumanPlus通过HIT算法,能够从少量演示中快速学习复杂的任务,大大减少了训练数据的需求和训练时间。这种高效的学习能力使得人形机器人能够快速适应新任务和新环境。
2. 实时控制能力
HST提供了实时全身控制功能,使得人形机器人能够实时响应人类操作员的动作指令。这种实时控制能力对于需要快速反应和精确执行的任务至关重要。
3. 泛化能力
HumanPlus展现出良好的跨任务泛化能力,能够将学到的技能应用于不同的任务中。这使得人形机器人在面对多样化的任务时,能够灵活运用已学知识,提高任务执行的效率和成功率。
4. 开源特性
HumanPlus的开源特性使得研究人员和开发者能够快速上手并进行定制化开发。开源社区的协作和贡献进一步推动了HumanPlus的发展和改进。
五、应用场景
1. 服务机器人
HumanPlus可以用于开发能够执行复杂任务的服务机器人,如清洁、搬运、照顾老人等。通过实时模仿人类动作,服务机器人能够更自然地与人类交互,提高服务质量和效率。
2. 工业自动化
在工业环境中,HumanPlus可以用于控制人形机器人完成复杂的装配和操作任务。人形机器人能够模仿人类工人的动作,进行精细的操作和复杂的任务执行,提高生产效率和质量。
3. 教育和研究
HumanPlus为教育和研究提供了强大的工具,帮助研究人员探索人形机器人的控制和学习算法。学生和研究人员可以通过HumanPlus平台进行实验和研究,推动人形机器人技术的发展。
4. 医疗康复
HumanPlus可以应用于医疗康复领域,辅助患者进行康复训练。人形机器人能够模仿治疗师的动作,为患者提供个性化的康复训练方案,提高康复效果和患者的生活质量。
5. 娱乐产业
在娱乐产业中,HumanPlus可以用于开发具有高度互动性的人形机器人角色。这些机器人能够模仿演员的动作和表情,为观众带来更加逼真和精彩的表演。
六、总结
HumanPlus通过实时影子系统和模仿学习算法,为人形机器人的控制和学习提供了新的思路和工具。其高效的学习能力、实时控制能力和跨任务泛化能力,使得人形机器人在多个领域展现出巨大的应用潜力。然而,HumanPlus也存在一些局限性,例如硬件平台的自由度有限、手部和交互区域的视野限制等。希望在未来的改进中,能够实现更具自主性和鲁棒性的人形机器人技能,以应用于各种现实世界的任务。
七、相关资源
项目主页:https://humanoid-ai.github.io
GitHub仓库:https://github.com/MarkFzp/humanplus
AI大模型+具身智能2025·系列
1.清华发布UniAct:仅需50条数据,快速适配新机器人!跨平台泛化能力震惊行业
(文:小兵的AI视界)