

在仿生机器人领域,昆虫尺度飞行器的研发一直面临着能源供给、推进效率与姿态稳定性之间的棘手矛盾。传统方案采用线缆供电,虽然能够绕过机载电池带来的重量限制,但却大大牺牲了运动自由度,限制了飞行器的灵活应用。而光能、风能等无线供能方式,虽然在一定程度上实现了无缆化,却又因为环境依赖性强、控制精度低等问题而难以广泛应用。值得注意的是,磁驱动技术因其快速响应、穿透性强、可控性高等独特优势,在微型游泳机器人和爬行机器人中已经得到了成功验证。然而,这一技术在空中飞行领域的应用却长期处于空白状态。
近日加州大学伯克利分校的研发人员设计出了一种新型可控无线飞行机器人。它的设计灵感来源于大黄蜂,能够在空中盘旋、调整飞行轨迹,并且具备一定的目标击中能力。这款机器人非常小巧,直径不足1厘米,重量也仅有21毫克,是目前世界上最小的可控无线飞行机器人之一。目前该研究成果已在《Sci. Adv.》子刊发表。
机器人的主体结构由四个螺旋桨叶片和一个平衡环组成,整个结构通过高精度的三维打印技术制造而成。螺旋桨叶片的设计是机器人能否产生足够升力的关键。研究团队通过大量的实验和数值模拟,优化了叶片的几何形状和尺寸,以在低雷诺数条件下实现最佳的气动性能。同时,叶片的材料选择也经过了精心考虑,以确保其既具有足够的强度以承受高速旋转时的离心力,又足够轻便以减小机器人的整体重量。
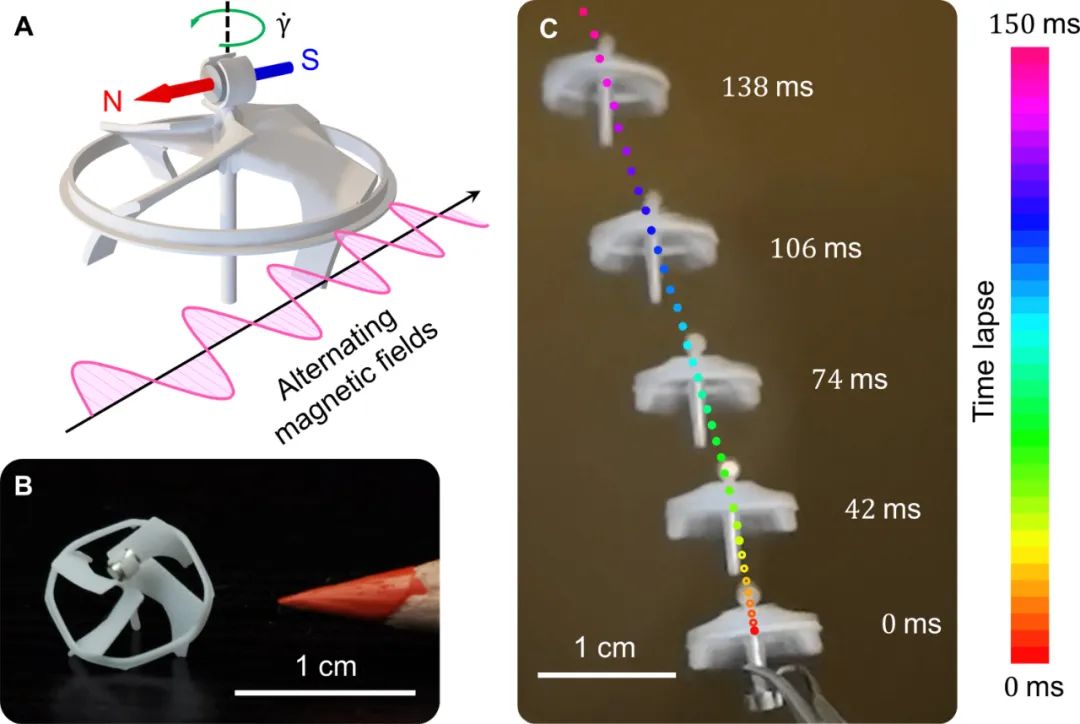
无绳亚厘米级飞行机器人的工作原理
平衡环的设计是机器人实现稳定飞行的另一重要因素。它位于螺旋桨叶片的中心,通过增加机器人旋转时的惯性矩,在高频旋转条件下产生强烈的陀螺效应。这种陀螺效应有助于抵抗外部扰动,保持机器人的飞行姿态稳定。平衡环的材料和尺寸也经过了精心计算和设计,以确保其既能提供足够的稳定性,又不会过分增加机器人的重量。
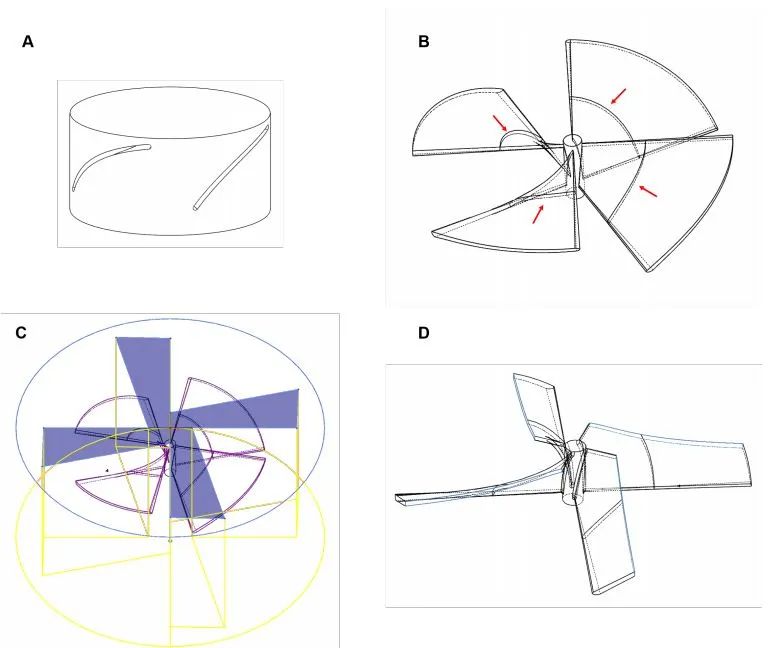
螺旋桨叶片的几何设计
两个微小的永磁体被固定在机器人的主体结构上,它们的磁矩方向与外部磁场方向保持一致,以最小化磁能。这两个永磁体是机器人实现单轴交变磁场驱动的关键。当外部磁场发生变化时,永磁体会受到磁力矩的作用而发生旋转。这个旋转运动通过螺旋桨叶片转化为升力,使机器人能够在空中飞行。
永磁体的选择至关重要。它们需要具有足够的磁能积以产生足够的磁力矩,同时又要足够轻便以减小机器人的整体重量。研究团队经过多次筛选和测试,最终选择了高性能的钕铁硼永磁体,其直径为1毫米,厚度为0.5毫米,每个永磁体的质量为3.15毫克。
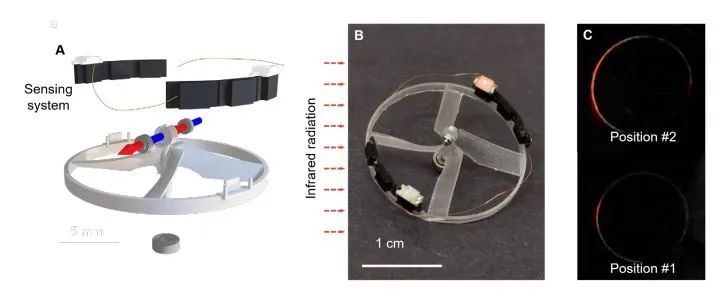
无动力红外传感系统
机器人的驱动机制基于单轴交变磁场。外部磁场发生器产生一个交变的磁场,其频率和强度可以精确控制。当这个交变磁场作用于机器人上的永磁体时,会产生一个周期性变化的磁力矩。这个磁力矩驱动永磁体旋转,进而带动螺旋桨叶片旋转产生升力。
为了实现稳定的飞行,研究团队对外部磁场的频率和强度进行了精确的计算和优化。他们发现,当外部磁场的频率与机器人螺旋桨叶片的自然频率相匹配时,会产生共振效应,从而显著提高升力效率。同时,通过调整外部磁场的强度,可以控制机器人的飞行速度和高度。
值得注意的是,由于机器人内部存在空气阻力和惯性力等非线性因素,其运动状态并不是完全由外部磁场决定的。因此,研究团队还开发了先进的控制算法,通过实时监测机器人的飞行状态并调整外部磁场的参数,实现对其运动的精确控制。
在微型飞行器的设计中,飞行稳定性是一个至关重要的问题。传统的飞行稳定控制方法往往依赖于复杂的传感器和控制系统,这会增加机器人的重量和成本。本研究通过创新的陀螺稳定设计,实现了一种无需复杂传感器的飞行稳定性控制方法。
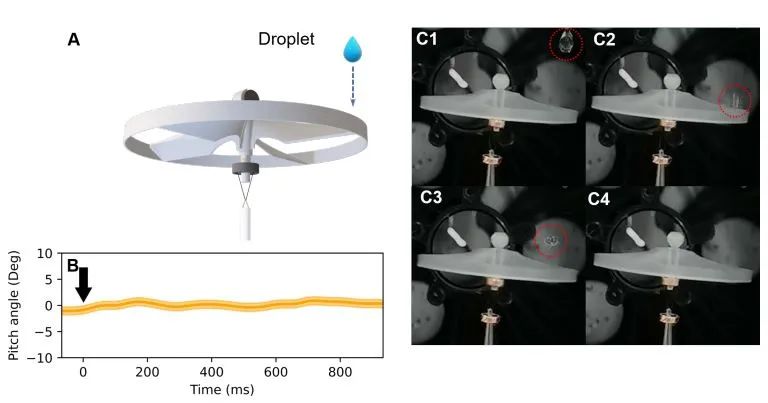
通过施加液滴脉冲扰动进行稳定性测试
如前所述,平衡环的设计增加了机器人旋转时的惯性矩,从而在高频旋转条件下产生强烈的陀螺效应。这个陀螺效应有助于抵抗外部扰动,保持机器人的飞行姿态稳定。此外,研究团队还通过优化螺旋桨叶片的形状和尺寸,使其产生的不对称气流能够对机器人的飞行姿态产生微调作用,进一步提高了飞行稳定性。
▍实验结果与分析
在实验测试中,研究人员发现该机器人能够自动调整其滞后角(即永磁体旋转角度与外部磁场变化之间的相位差)以适应不同强度的磁场变化。这种自适应能力简化了飞行操作,使机器人能够在不同条件下保持稳定的飞行状态。
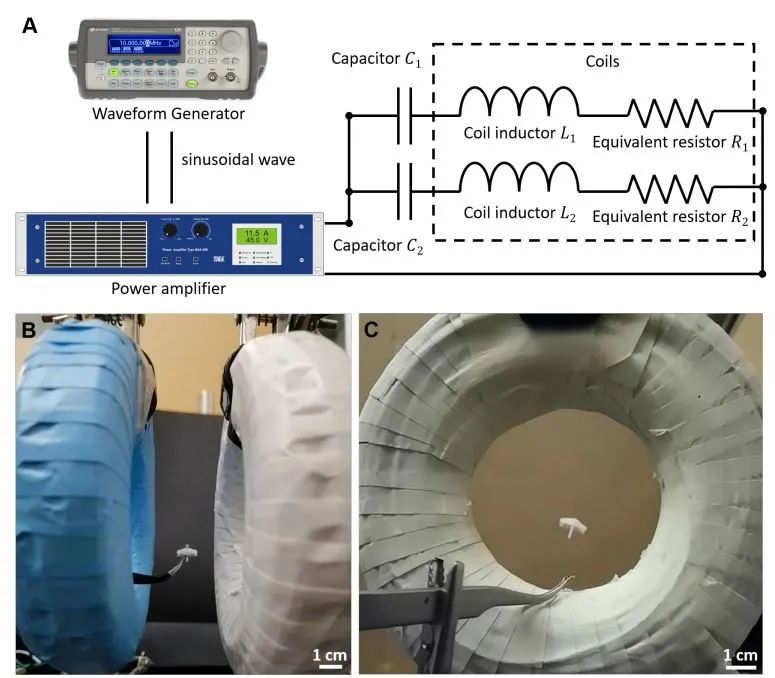
实验装置一览
通过光学装置和高速相机,研究人员测量了机器人在不同频率和强度磁场下的角速度和滞后角。实验结果表明,随着驱动频率的增加,机器人的角速度也相应增加,但滞后角却保持在较小的范围内(如12°左右)。这种稳定的滞后角关系对于维持机器人的持续稳定飞行至关重要。
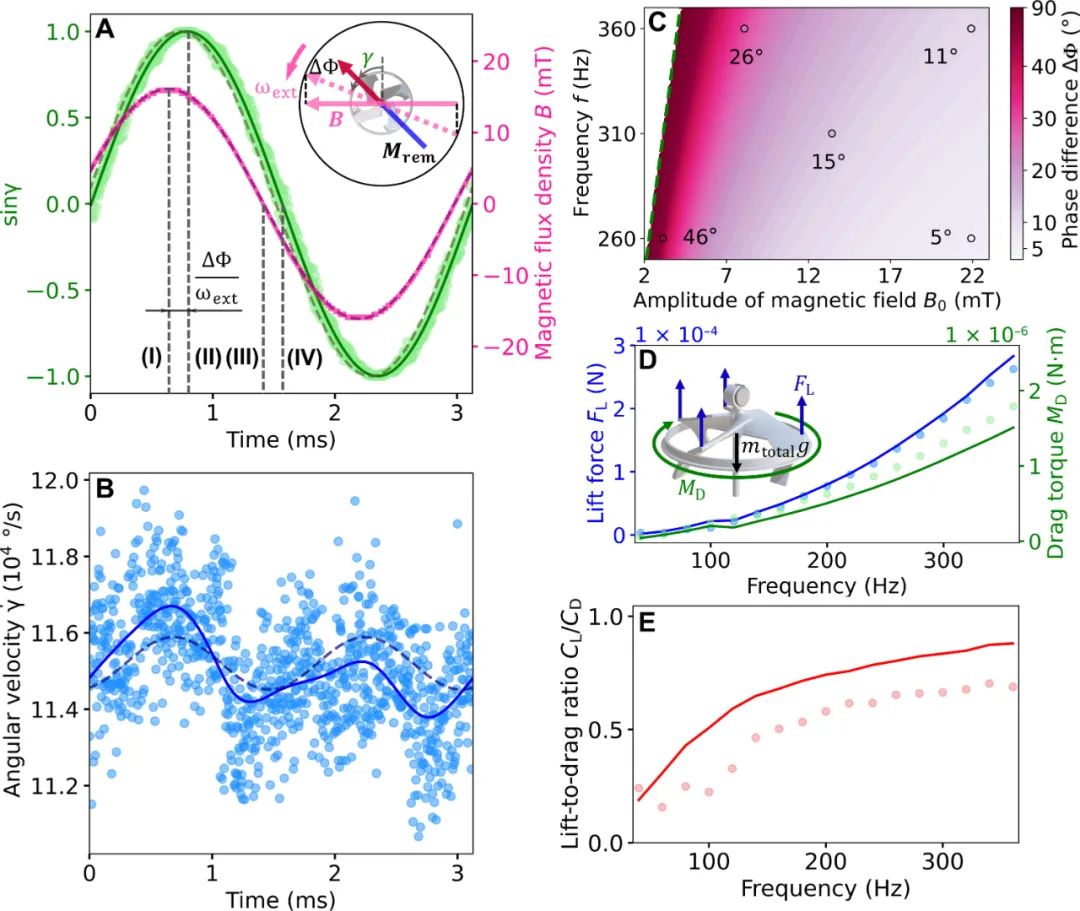
旋转运动学和气动性能
此外,研究人员还通过数值模拟和实验验证了机器人的气动性能。结果表明,随着驱动频率的增加,机器人的升力和阻力均有所增加,但升力-阻力比(即升力与阻力之比)却呈现先增加后趋于稳定的趋势。在雷诺数约为2500时,机器人的升力-阻力比达到了0.7,这一指标优于许多其他微型飞行器。
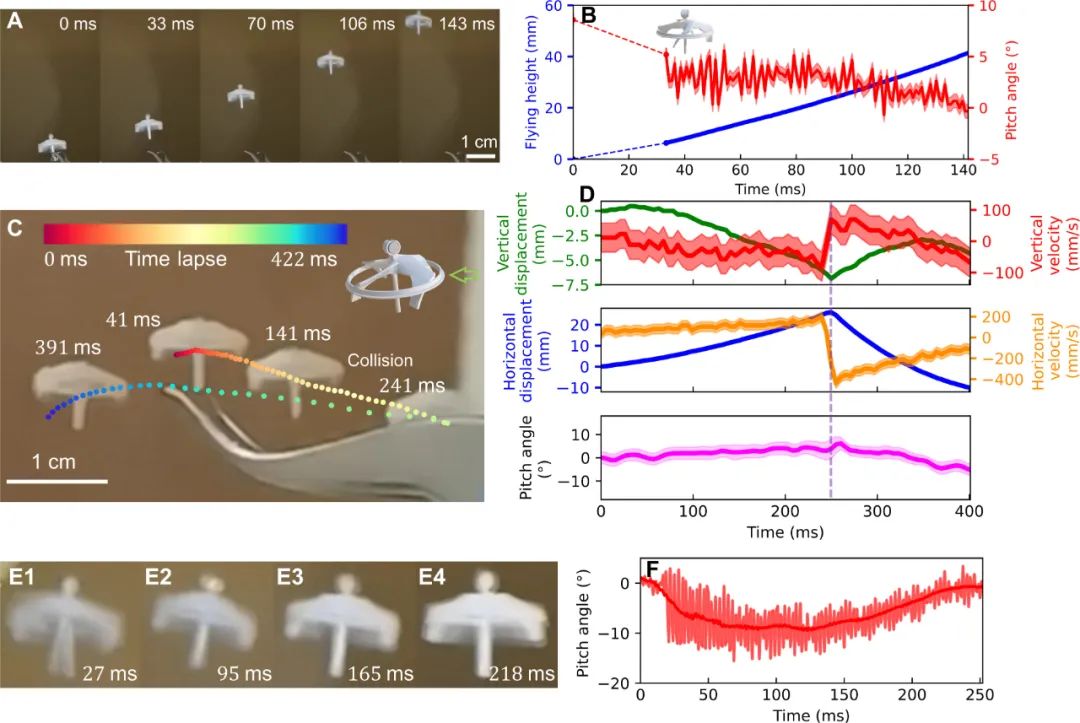
向上、悬停、碰撞生存和姿态恢复的无系留飞行演示
在飞行测试中,该机器人成功实现了向上飞行、悬停、避障和航迹调整等复杂动作。向上飞行测试显示,机器人在约138毫秒内飞行了约4厘米的距离,平均垂直加速度为1.4米/秒²。悬停测试则表明,机器人能够在空中保持一定时间的稳定飞行状态。避障测试中,机器人通过调整飞行轨迹成功避开了障碍物,并展示了良好的目标击中能力。
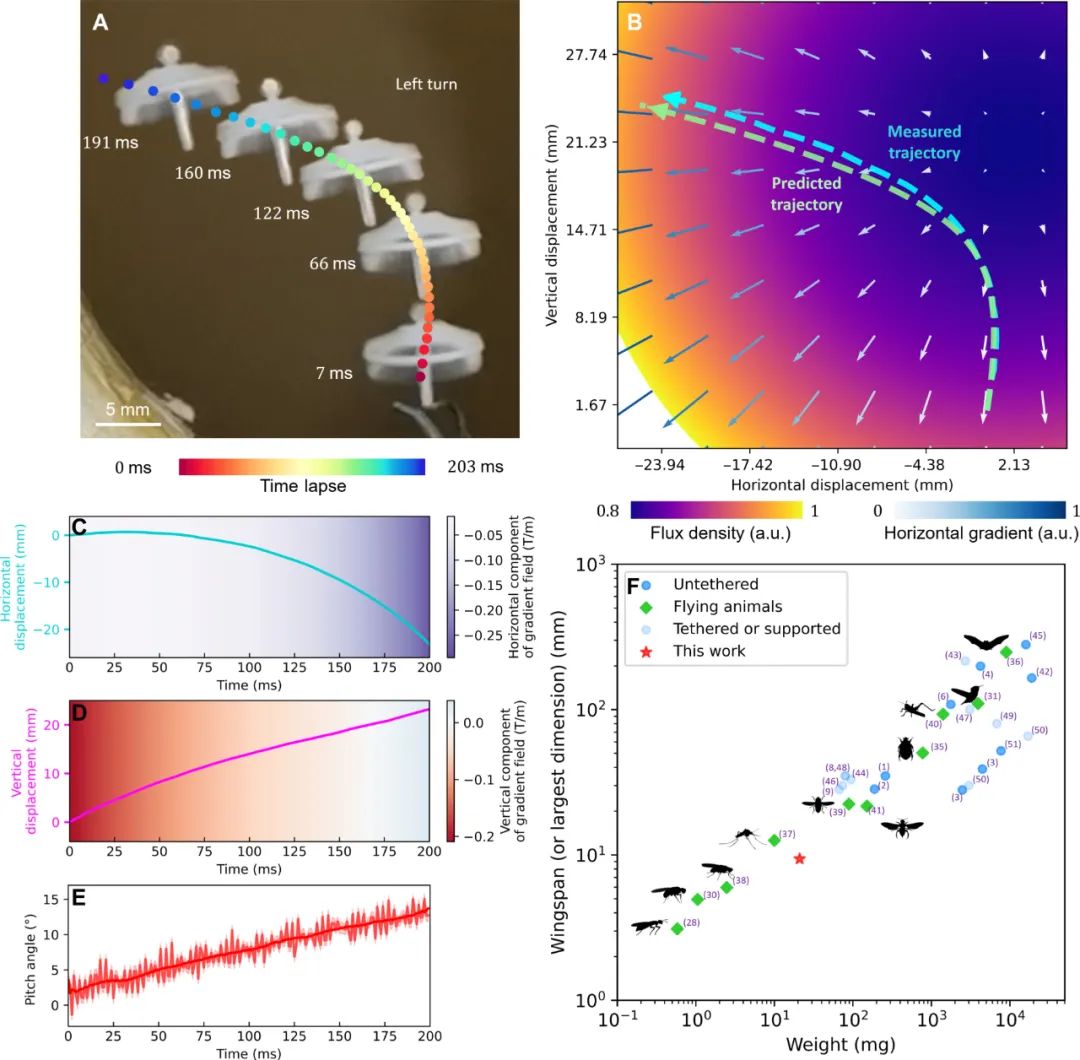
左转飞行并与现有技术进行比较
在碰撞测试中,研究人员发现该机器人在碰撞后能够迅速恢复飞行姿态,存活率高达76.5%。这一结果充分证明了该机器人在复杂环境中的鲁棒性和可靠性。
▍结语与未来:
加州大学伯克利分校研究人员通过磁-力耦合驱动设计与低雷诺数气动优化,研制出全球最小的可控无线飞行机器人,并在微型化、能效比与抗扰动能力等核心指标上取得突破,解决了传统微型飞行器依赖线缆、控制笨重的难题。梯度磁场导航与陀螺稳定技术的结合,为微型无人系统的自主化提供了全新的参考方向。尽管目前续航时间与三维控制方面仍需突破,但该研究已向昆虫尺度的仿生机器人实用化迈出了关键一步。
(文:机器人大讲堂)