
当前人形机器人产业正面临“一高五难”的发展困境,即硬件门槛高以及软件算法难、软硬解耦难、知识积累难、人才聚集难、安全应用难等问题。通过开放本体设计、运动控制算法等核心技术,开发者能够直接复用已验证平台工具,大幅缩短开发周期,减少重复“造轮子”的情况。因此开源已成为行业突破技术瓶颈、加速生态构建的关键路径。
从国内人形机器人本体开源现状来看,尽管近年来基于运动控制算法和模型的开源已形成一定生态,但针对硬件本体开源仍处于起步阶段,头部企业更倾向于通过封闭技术体系构建护城河。因此目前能够开源且经过验证的人形机器人本体极为稀缺。

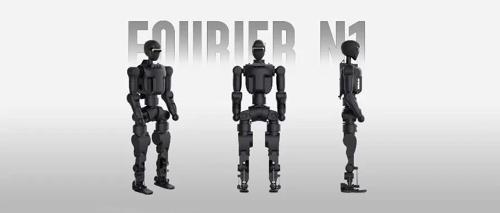
4月11日,傅利叶正式发布了其最新的开源人形机器人——Fourier N1,并同步开源了包含物料清单、设计图纸、装配指南以及基础操作软件在内的完整本体资源包。据悉,Fourier N1是傅利叶“Nexus开源生态矩阵”中的首个落地项目(“N1”即“Nexus-01”),目的是为全球的机器人及具身智能开发者提供一个开放创新的技术基座,以加速高泛用性运动控制器、多模态模型结合以及具身载体的未来形态推演等前沿研究开发工作的验证落地。
▍最快奔跑速度达3.5 米/秒 搭载FSA2.0一体化执行器
Fourier N1整体机身采用紧凑型硬件架构设计,身高1.3米,体重 38 公斤,全身拥有 23 个自由度。整机结构由铝合金与工程塑料复合构成,在保证本体强度的同时兼顾关节灵活性。

电池采用背部插拔式设计,单次连续运动续航可达2小时以上,能够满足高频测试与便捷部署需求。

傅利叶自主研发新一代FSA 2.0一体化执行器
此外,Fourier N1搭载傅利叶自研的FSA 2.0一体化执行器,结合自研控制系统,在提升运动稳定性与抗冲击能力的同时,实现更高精度的位姿控制。实测最高稳定奔跑速度可达 3.5 米/秒,在保持输出上限的同时兼备优越的动态响应能力。
▍零门槛 帮助开发者短时间复刻Fourier N1
Fourier N1的首批开源材料涵盖了从硬件到基础控制系统的核心构建要素,帮助开发者在最短时间内完成N1的完整复刻。

硬件制造体系方面,傅利叶提供了完整的物料清单(BOM),可供直接加工的结构图纸,详细的装配指南以及操作演示视频,确保开发者能够顺利进行硬件的组装和调试。

基础控制系统方面,傅利叶已将基础操作软件代码开源至GitHub,开发者可以自由访问。此外,通讯接口的封装也同步开源,进一步提升了开发的便捷性和灵活性。
后期,傅利叶计划逐步开放针对该平台的推理代码与训练框架,为全球开发者提供更加完善的验证与开发环境,从而加速机器人技术的创新和应用。
▍累计超1000小时复杂地形路测 可完成单足站立撑地爬起复杂动作
在产品研发阶段,Fourier N1历经长周期、高强度的运动算法验证,核心控制系统在响应速度、精度控制及抗干扰能力等关键性能上,均达到了预期技术标准。
为确保开源项目的有效性,Fourier N1在发布前就已累计完成超过1000小时的户外复杂地形适应性测试,单次连续运行时长突破72小时。全面验证了其结构设计的稳定性、耐久性与环境适应性。



运动能力方面,Fourier N1基于强化学习,稳定行走速度为0.5米/秒,稳定跑步速度为1.4米/秒,最大稳定奔跑速度为3.5 米/秒。


此外,Fourier N1还实现了原地撑地爬起能力,并能完成单足平稳站立的高难度动作。
在上下斜坡测试当中,Fourier N1能够在15°~20°坡度斜坡场景下保持稳定运动姿态。

盲视状态下上下台阶能力展示
盲视状态下,Fourier N1也能轻松实现20厘米高度台阶跨越,上下楼梯步态自然流畅。
Fourier N1动作演示
▍生态共建 Fourier Nexus构建全链条技术共享平台
Fourier Nexus通用机器人生态网络是以机器人本体技术为基础,贯通算法开发、硬件制造与商业化应用全链条的技术共享平台。通过“硬件开发+算法开源+数据共享”的三维架构,该技术共享平台可系统性地降低研发门槛、加速技术迭代效率、促进跨领域协同创新。

目前,傅利叶旗下拥有GRx系列全尺寸人形机器人与Fourier N1开源人形机器人两条产品线。GRx聚焦于行业客户和跨行业伙伴,更关注行业应用场景的解决方案落地。
而N1作为一款面向机器人社区打造的零门槛、高性能的人形机器人,傅利叶希望通过开放技术,让更多的机器人爱好者能够参与其中,推动技术创新,形成更为强大的技术开源社区。

傅利叶强调,发布的开源产品必须经过严格的技术验证,而不仅仅是概念产品。这也体现了傅利叶推动人形机器人共建生态的长期决心。
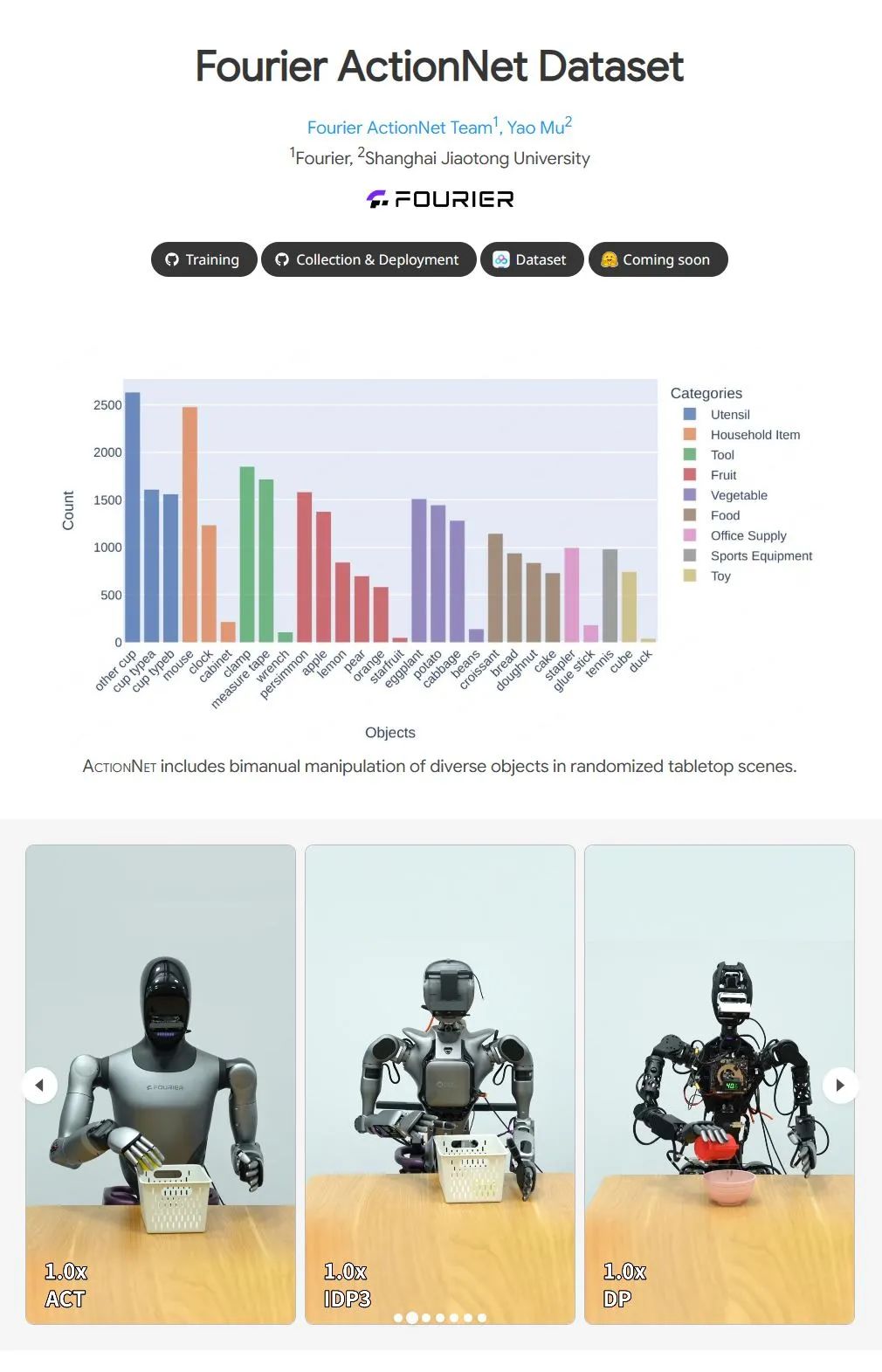
傅利叶开源全尺寸人形机器人数据集——Fourier ActionNet
此次N1的开源发布,是傅利叶构建“硬件 + 算法 + 数据”三位一体开放体系的又一重要举措,也标志着公司在人形机器人领域从单点技术突破迈向系统生态建设的关键一步。
▍结语与未来:
让所有人以更低的门槛参与到人形机器人开发当中,通过开源打破传统机器人行业“闭门造车”的困境,正如傅利叶强调的一样,Fourier N1提供了类似乐高积木的模块化硬件架构,配合开源数据与算法,让开发者重新定义想象力边界。

回顾历史我们不难发现,开源模式对技术生态的驱动作用非常明显。2018年,MIT仿生机器人实验室(MIT Biomimetic Robotics Lab)开源Mini Cheetah四足机器人项目,通过共享硬件设计文档、控制算法框架及仿真平台等核心资源,构建起国际化技术协作网络。
在此开源基础上,中国四足机器人产业实现快速发展。本土企业依托开源工具链,快速突破运动控制算法优化、轻量化材料应用及环境感知等关键技术,并结合自主创新,在机械结构设计、能源管理系统及场景化应用等领域形成差异化优势。这种“开源吸收-自主创新”模式直接推动中国四足机器人技术跻身全球第一梯队,并在国际上拥有充足的话语权。而今天Fourier N1的开源又何尝不是一个新的起点呢?
开源资料(持续更新)
BOM清单、整机STEP、整机图纸、装机SOP可通过以下途径下载
百度网盘:
https://pan.baidu.com/s/1tMbhTLfY-tFFIe2poseqLA?pwd=cedk
GitHub:
https://fourier-grx-n1.github.io/
(文:机器人大讲堂)