
第一作者:Guoqiang Xu,Haoyu Wang,Guangyao Zhao,Jingjing Fu
通讯作者:Xinge Yu,Zijian Zheng,Yunlong Zi
通讯单位:香港城市大学,香港理工大学,香港中文大学,香港科技大学
DOI: 10.1126/sciadv.adt0318
▍背景介绍
近年来,虚拟现实(VR)/增强现实(AR)和元宇宙的快速发展对人与机器之间的交互产生了革命性的影响。这些新兴技术在用户和物理/虚拟对象之间建立了一种交互模式,其中包括视觉、听觉、触觉、嗅觉和其他感官的信息。在这些感官中,触觉反馈(也称为触觉)在传输和再现“触摸”方面发挥着重要作用,可以增强VR/AR体验,提高与机器交互的准确性,并将信息从机器人端同步到用户端。因此,触觉技术是增强人机界面交互的关键。
最先进的触觉技术基本上与机械振动、气动装置和电刺激相关联,这些技术直接向皮肤下的机械感受器提供刺激,以实现感知。这些设备通常需要大量额外的配件和电缆进行电力传输和连接,导致设备大型、重型,从而显著限制了它们的潜在应用。此外,这些设备的发热、高工作电压和高成本带来的挑战也引发了安全问题和普遍实际使用方面的担忧。为了解决这些问题,最近通过引入新的刺激形式、采用创新的电极材料、提高机械致动器的工作效率以及植入射频作为电源,在开发轻薄柔软的可穿戴触觉界面方面做出了努力。然而,从功耗到物理离职的电源管理问题仍然存在。
触觉技术实现自供电机械,如自供电传感器,将是革命性的。众所周知,传感器通常比致动器消耗更少的功率。为了实现自供电触觉设备,重要的是选择高效的功率转换技术以及降低致动器的功耗。在所有自供电传感技术中,摩擦电纳米发电机(TENG)似乎最适合通过转换机械力来提供高压。TENG已被证明可用作起搏器,并因其固有的放电特性而表现出色。这种产生放电的独特能力有可能被用作触觉感知的方法。因此,通过制定适当的基于TENG的电刺激策略,可以开发出自供电的触觉界面。
▍本文亮点
1. 本工作介绍了一种可穿戴触觉技术的概念:一种薄、柔软、自供电的电触觉纺织手套,它利用摩擦电效应和气体击穿放电进行局部电刺激。
2. 每天的手部动作会产生足够的机械能来为SPETH手套供电。它的特点——柔软、轻便、自我可持续性、便携性和可负担性——使其能够随时随地提供触觉反馈,而无需外部设备。
3. 这使得SPETH手套成为一种增强的、无电池的HMI,适用于各种应用。
▍图文解析
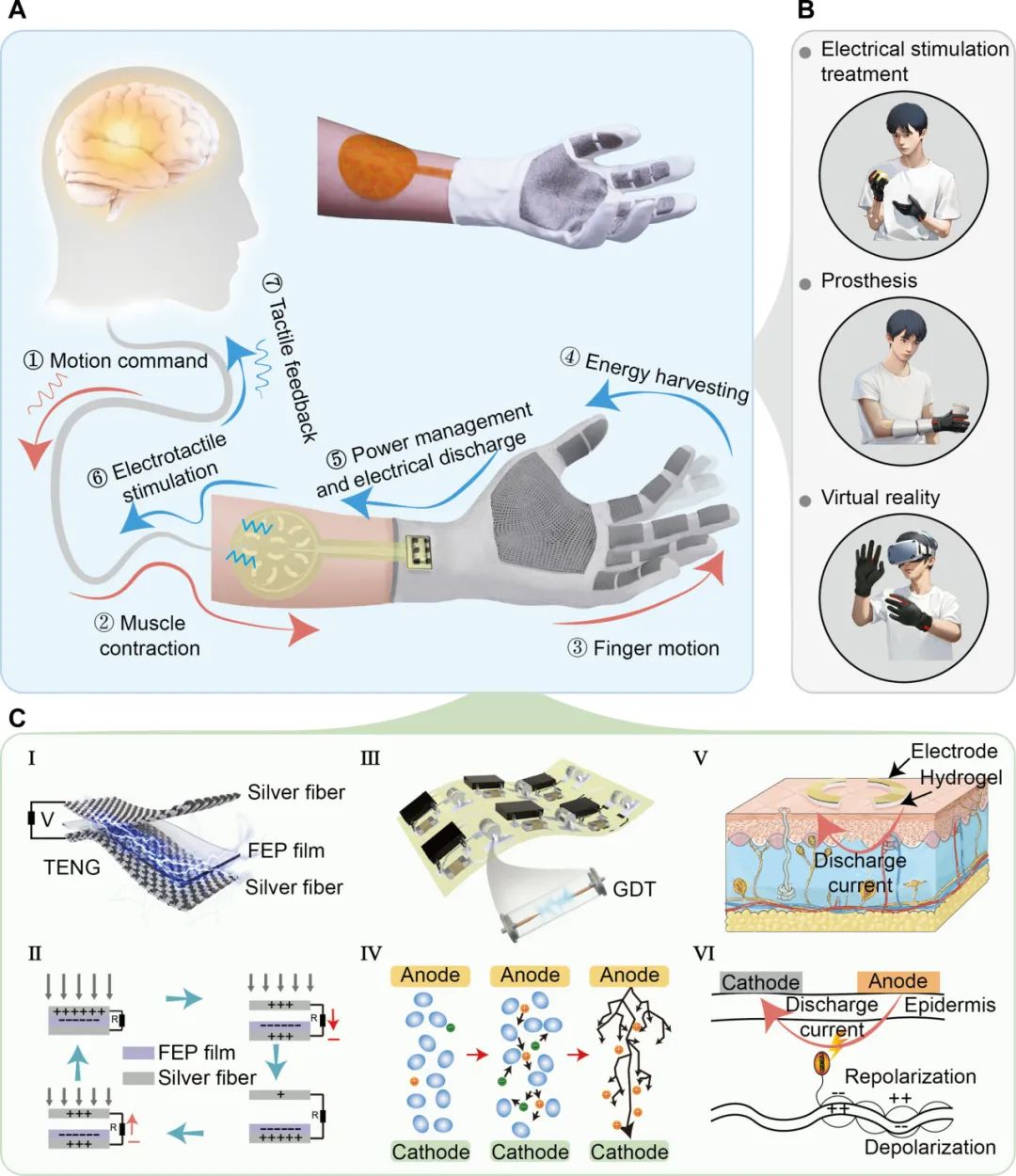
图1. 摩擦电效应和放电电流启用SPETH手套示意图。
(A) SPETH手套的图示。(B) SPETH手套的应用,包括电刺激疗法、假肢和虚拟现实。(C) 触觉手套的组件和示意图,包括[(C),I]基于织物的TENG单元和[(C,II]工作原理,[(C、III]带气体放电管的管理电路示意图和[(C),IV]空气放电原理,其中椭圆形图表示空气中的中性粒子,而带正负符号的圆圈对应于带正负电荷的离子,以及[(C”,V]皮肤电极和[(C.),VI]触觉原理。
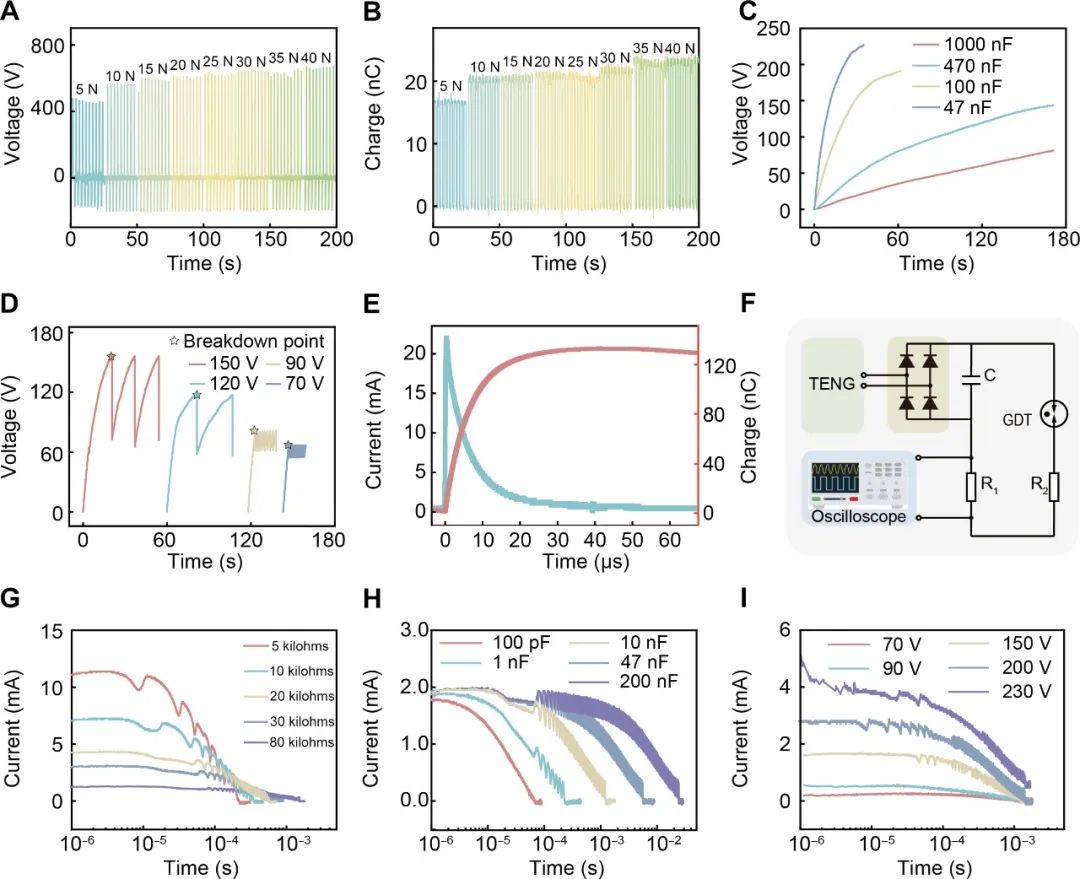
图2. SPETH手套的电气性能和放电电流。
(A) SPETH手套的TENG单元在不同压力下的电压和(B)充电曲线,其中TENG的尺寸为1.5厘米乘1.5厘米。(C)使用TENG单元对不同电容器充电的电压-时间曲线。(D) 不同电压击穿阈值下GDT的电压-时间曲线。(E) 皮肤放电期间的电流和电荷曲线。(F)GDT放电电流测试示意图。不同(G)电阻、(H)电容和(I)放电阈值下不同GDT的电流曲线。
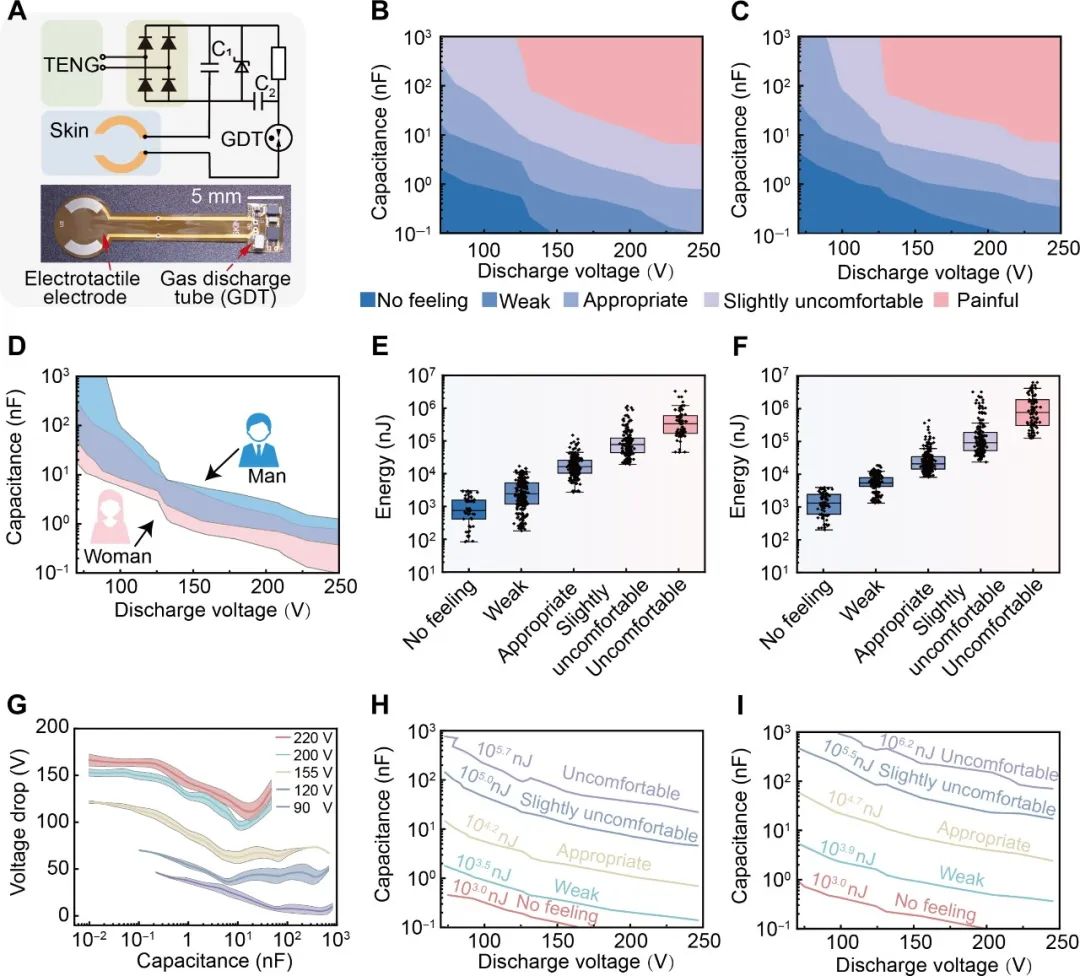
图3. SPETH手套电刺激触觉反馈结果显示。
(A) 触觉反馈测试示意图。(B)女性和(C)男性参与者在不同电容和放电阈值电压下的感觉分级图。共有30名参与者被纳入,感觉分为五个级别:无感觉、虚弱、适当、有点不舒服和疼痛。(D) 男性和女性参与者的舒适区比较图。男性用蓝色表示,女性用粉色表示。(E) 不同放电阈值和电容下GDT的电压降曲线。(F)女性和(G)男性参与者在不同感觉水平下皮肤上接收到的电刺激能量的箱线图。不同感觉下(H)名女性和(I)名男性参与者的电刺激能量分布图。电刺激能量由[(F)和(G)]的平均值定义。
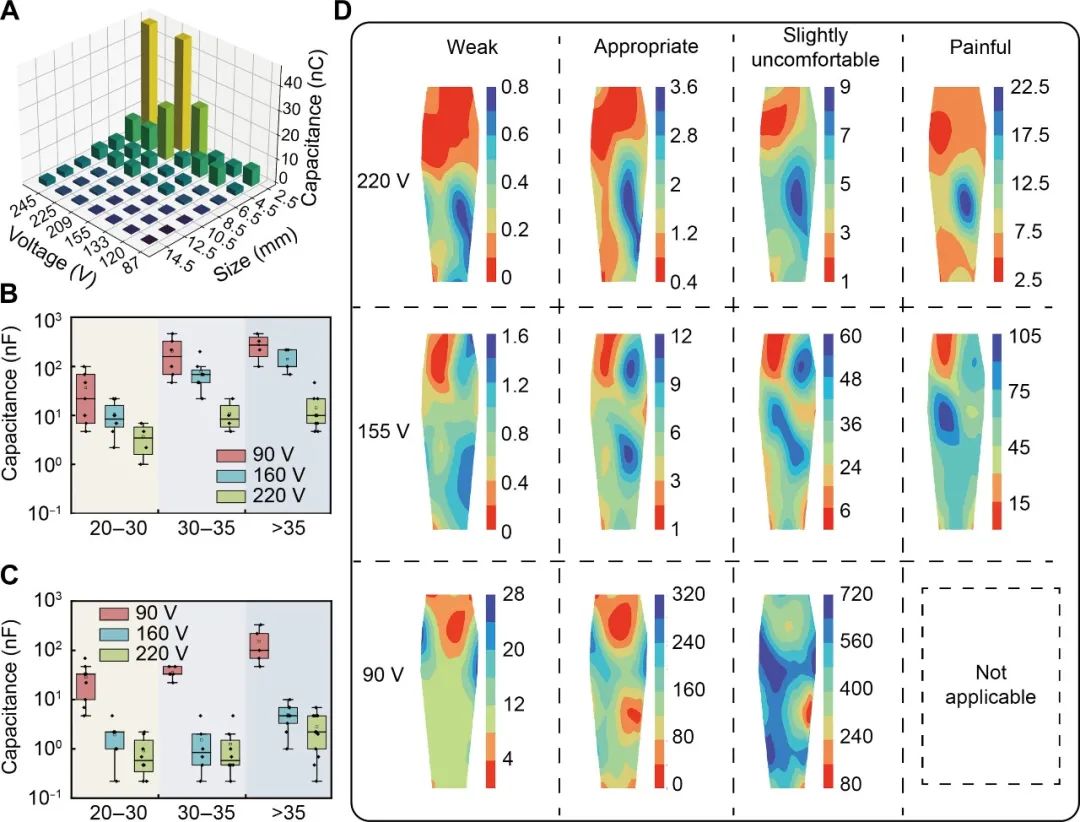
图4. 手臂的阈值特征化结果。
(A) 不同尺寸电极的最小触觉感知电压和电容的比较。(B) 不同年龄组男性手臂中心舒适阈值的比较。(C) 不同年龄组女性手臂中心舒适阈值的比较。(D) 热图显示了不同电压下整个手臂的分级感觉。
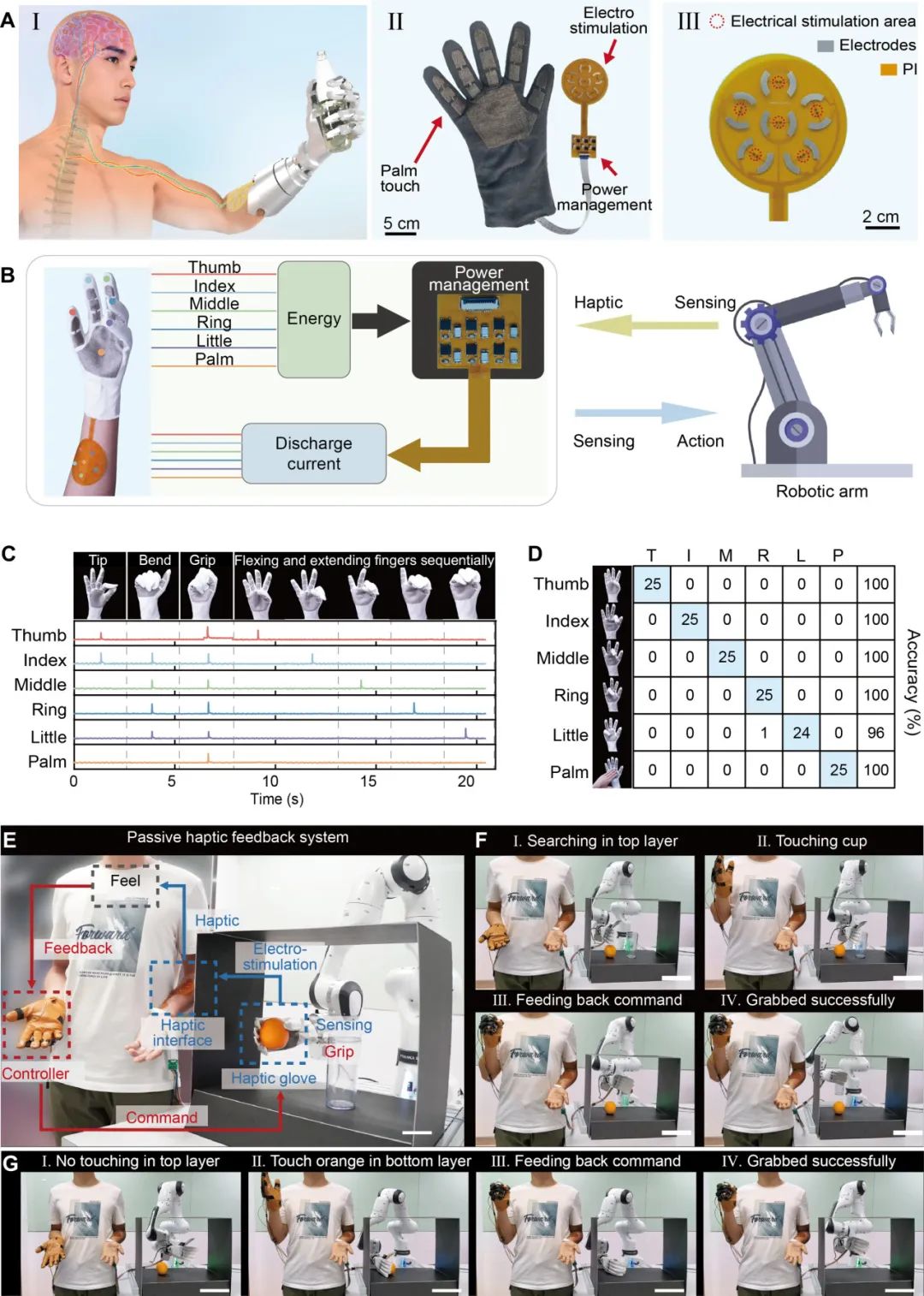
图5. SPETH手套在幻肢感觉和被动触觉反馈系统中的应用。
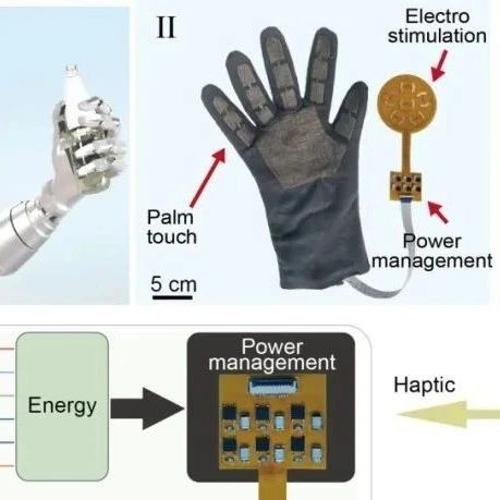
(A) [(A),I]应用于肢体感觉的触觉手套的图示,其中机器人手和目标之间的接触可以电刺激触觉反馈到人的手臂。触觉手套和[(A),III]电极的照片。(B) 触觉手套由摩擦电手套、电源管理单元和电极组成。(C) 显示不同手指手势产生的信号。(D) 识别不同手指手势的混淆矩阵。(E) 基于SPETH手套的被动触觉反馈系统的整体说明,其中佩戴在机器人手上的触觉手套可以为人的手臂提供触觉,允许人类通过这种感官反馈控制机器人手。(F和G)在一个黑匣子中演示被动触觉反馈系统的应用,在这个黑匣子中,不同高度的杯子和橙子被成功感知和抓取。
来源:CAAI认知系统与信息处理专委会
第一作者:Guoqiang Xu,Haoyu Wang,Guangyao Zhao,Jingjing Fu
通讯作者:Xinge Yu,Zijian Zheng,Yunlong Zi
通讯单位:香港城市大学,香港理工大学,香港中文大学,香港科技大学
DOI: 10.1126/sciadv.adt0318
▍背景介绍
近年来,虚拟现实(VR)/增强现实(AR)和元宇宙的快速发展对人与机器之间的交互产生了革命性的影响。这些新兴技术在用户和物理/虚拟对象之间建立了一种交互模式,其中包括视觉、听觉、触觉、嗅觉和其他感官的信息。在这些感官中,触觉反馈(也称为触觉)在传输和再现“触摸”方面发挥着重要作用,可以增强VR/AR体验,提高与机器交互的准确性,并将信息从机器人端同步到用户端。因此,触觉技术是增强人机界面交互的关键。
最先进的触觉技术基本上与机械振动、气动装置和电刺激相关联,这些技术直接向皮肤下的机械感受器提供刺激,以实现感知。这些设备通常需要大量额外的配件和电缆进行电力传输和连接,导致设备大型、重型,从而显著限制了它们的潜在应用。此外,这些设备的发热、高工作电压和高成本带来的挑战也引发了安全问题和普遍实际使用方面的担忧。为了解决这些问题,最近通过引入新的刺激形式、采用创新的电极材料、提高机械致动器的工作效率以及植入射频作为电源,在开发轻薄柔软的可穿戴触觉界面方面做出了努力。然而,从功耗到物理离职的电源管理问题仍然存在。
触觉技术实现自供电机械,如自供电传感器,将是革命性的。众所周知,传感器通常比致动器消耗更少的功率。为了实现自供电触觉设备,重要的是选择高效的功率转换技术以及降低致动器的功耗。在所有自供电传感技术中,摩擦电纳米发电机(TENG)似乎最适合通过转换机械力来提供高压。TENG已被证明可用作起搏器,并因其固有的放电特性而表现出色。这种产生放电的独特能力有可能被用作触觉感知的方法。因此,通过制定适当的基于TENG的电刺激策略,可以开发出自供电的触觉界面。
▍本文亮点
1. 本工作介绍了一种可穿戴触觉技术的概念:一种薄、柔软、自供电的电触觉纺织手套,它利用摩擦电效应和气体击穿放电进行局部电刺激。
2. 每天的手部动作会产生足够的机械能来为SPETH手套供电。它的特点——柔软、轻便、自我可持续性、便携性和可负担性——使其能够随时随地提供触觉反馈,而无需外部设备。
3. 这使得SPETH手套成为一种增强的、无电池的HMI,适用于各种应用。
▍图文解析
图1. 摩擦电效应和放电电流启用SPETH手套示意图。
(A) SPETH手套的图示。(B) SPETH手套的应用,包括电刺激疗法、假肢和虚拟现实。(C) 触觉手套的组件和示意图,包括[(C),I]基于织物的TENG单元和[(C,II]工作原理,[(C、III]带气体放电管的管理电路示意图和[(C),IV]空气放电原理,其中椭圆形图表示空气中的中性粒子,而带正负符号的圆圈对应于带正负电荷的离子,以及[(C”,V]皮肤电极和[(C.),VI]触觉原理。
图2. SPETH手套的电气性能和放电电流。
(A) SPETH手套的TENG单元在不同压力下的电压和(B)充电曲线,其中TENG的尺寸为1.5厘米乘1.5厘米。(C)使用TENG单元对不同电容器充电的电压-时间曲线。(D) 不同电压击穿阈值下GDT的电压-时间曲线。(E) 皮肤放电期间的电流和电荷曲线。(F)GDT放电电流测试示意图。不同(G)电阻、(H)电容和(I)放电阈值下不同GDT的电流曲线。
图3. SPETH手套电刺激触觉反馈结果显示。
(A) 触觉反馈测试示意图。(B)女性和(C)男性参与者在不同电容和放电阈值电压下的感觉分级图。共有30名参与者被纳入,感觉分为五个级别:无感觉、虚弱、适当、有点不舒服和疼痛。(D) 男性和女性参与者的舒适区比较图。男性用蓝色表示,女性用粉色表示。(E) 不同放电阈值和电容下GDT的电压降曲线。(F)女性和(G)男性参与者在不同感觉水平下皮肤上接收到的电刺激能量的箱线图。不同感觉下(H)名女性和(I)名男性参与者的电刺激能量分布图。电刺激能量由[(F)和(G)]的平均值定义。
图4. 手臂的阈值特征化结果。
(A) 不同尺寸电极的最小触觉感知电压和电容的比较。(B) 不同年龄组男性手臂中心舒适阈值的比较。(C) 不同年龄组女性手臂中心舒适阈值的比较。(D) 热图显示了不同电压下整个手臂的分级感觉。
图5. SPETH手套在幻肢感觉和被动触觉反馈系统中的应用。
(A) [(A),I]应用于肢体感觉的触觉手套的图示,其中机器人手和目标之间的接触可以电刺激触觉反馈到人的手臂。触觉手套和[(A),III]电极的照片。(B) 触觉手套由摩擦电手套、电源管理单元和电极组成。(C) 显示不同手指手势产生的信号。(D) 识别不同手指手势的混淆矩阵。(E) 基于SPETH手套的被动触觉反馈系统的整体说明,其中佩戴在机器人手上的触觉手套可以为人的手臂提供触觉,允许人类通过这种感官反馈控制机器人手。(F和G)在一个黑匣子中演示被动触觉反馈系统的应用,在这个黑匣子中,不同高度的杯子和橙子被成功感知和抓取。
来源:CAAI认知系统与信息处理专委会
(文:机器人大讲堂)