
编辑:泽南、陈陈
让我们祝贺获奖者。
本周三,全球图形学领域的顶级会议 SIGGRAPH 公开了今年的论文奖项。
SIGGRAPH 自 1974 年起由美国计算机协会计算机图形专业组(ACM SIGGRAPH)每年组织举办。该会议在图形图像技术,计算机软硬件等方面都有着相当高的影响力。如今,大会涵盖的技术领域包含动画、模拟、成像、几何、建模、渲染、人机交互、触觉、制造、机器人、可视化、音频、光学、编程语言、沉浸式体验、生成式人工智能和视觉计算机器学习等。
今年的 SIGGRAPH 大会将在 8 月 10-14 日在加拿大温哥华举行,根据此前信息,共有 306 篇技术论文被接收。
最佳论文奖
今年大会共评选出 5 篇最佳论文,国内机构收获颇丰,包括上海科技大学、华中科技大学、厦门大学、清华大学在内的机构获奖。以下是获奖及提名论文的简要介绍。
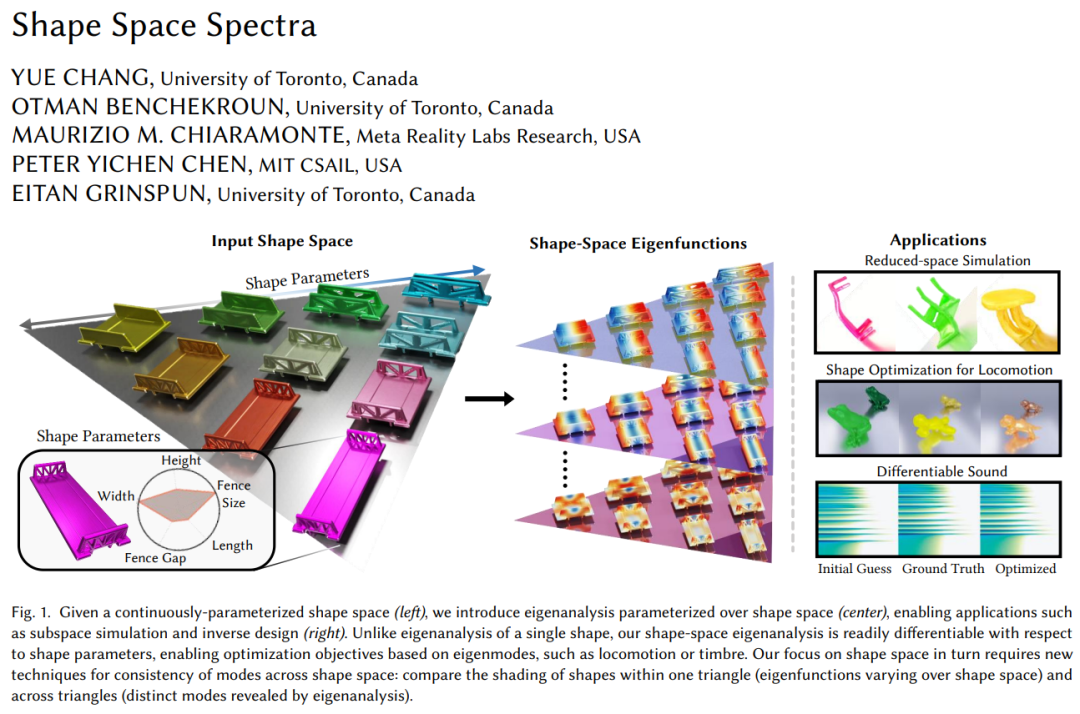
论文 1:Shape Space Spectra
-
论文地址:https://arxiv.org/pdf/2408.10099
-
机构:多伦多大学、Meta、MIT
-
作者:Yue Chang, Otman Benchekroun, Maurizio M. Chiaramonte, Peter Yichen Chen, Eitan Grinspu
论文作者之一常悦(Yue Chang),现在是多伦多大学的一名博士生,导师是 Eitan Grinspun 教授。在攻读博士学位之前,常悦在北京大学获得了硕士学位,2019 年在北京航空航天大学获得了学士学位。
论文摘要:对微分算子(如拉普拉斯算子或弹性能量 Hessian 矩阵)的特征分析通常局限于单一几何形状及其离散化形式,这极大的限制了 ROM(reduced order modeling)的应用范围。
本文引入了形状 – 空间特征分析来计算连续参数化形状家族中的特征函数。这些特征函数是通过最小化变分原理获得的。为了处理多重性点上的本征值优势交换,本文在优化过程中加入了动态重排序。该方法与离散化无关且可微分,使得其能够应用于声音合成、运动和弹性动力学模拟等领域。
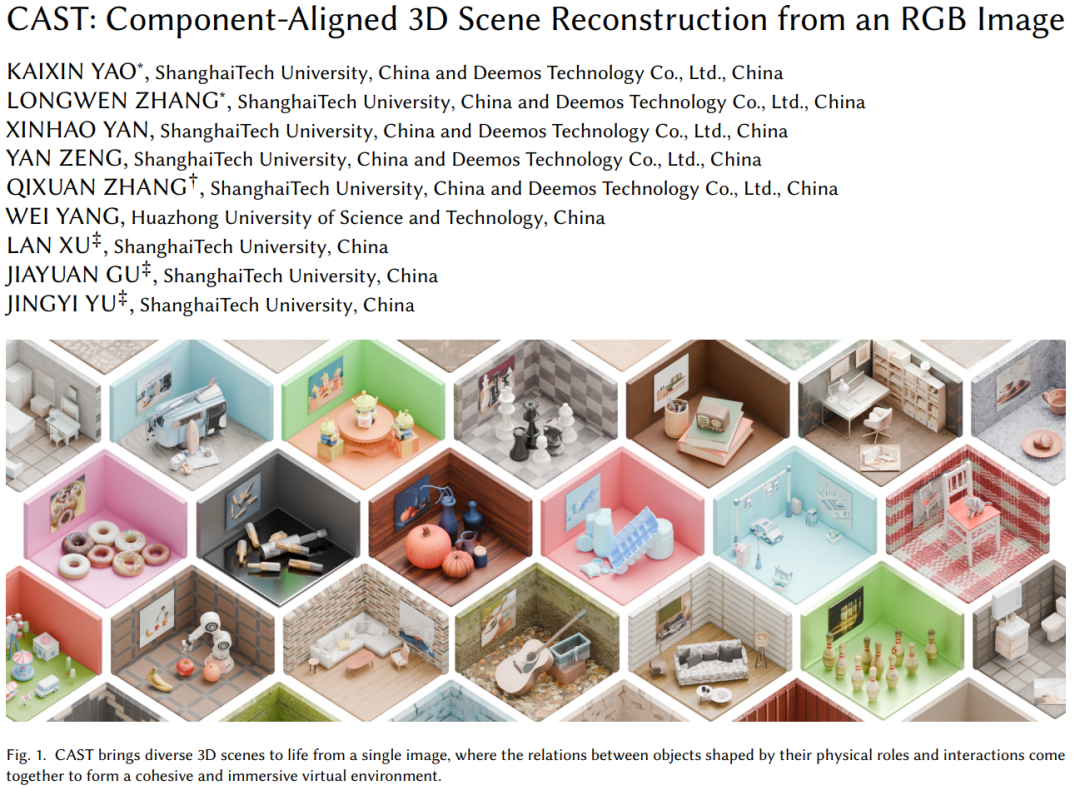
论文 2:CAST: Component-Aligned 3D Scene Reconstruction From an RGB Image
-
论文地址:https://arxiv.org/pdf/2502.12894
-
机构:上海科技大学、影眸科技、华中科技大学
-
作者:Kaixin Yao, Longwen Zhang, Xinhao Yan, Yan Zeng, Qixuan Zhang, Jiayuan Gu, Wei Yang, Lan Xu, Jingyi Yu
这篇获奖论文作者全部来自国内机构。此外,2024年该团队也曾获得两项SIGGRAPH最佳论文提名。
论文摘要:从单幅 RGB 图像恢复高质量的 3D 场景在计算机图形学中是一项极具挑战性的任务。当前的方法常常受限于特定领域或低质量的对象生成。
为了解决这些问题,本文提出了一种新颖的 3D 场景重建方法:CAST(基于单幅 RGB 图像的组件对齐 3D 场景重建)。
CAST 首先从输入图像中提取物体级别的 2D 分割信息和相对深度数据,随后通过基于 GPT 的模型分析物体间的空间关系。这种方法能够理解场景中各物体间的相互关联,从而确保更连贯的三维重建结果。
然后,CAST 采用遮挡感知的大规模 3D 生成模型,独立生成每个物体的完整几何形状,并使用掩码自编码器 (MAE) 和点云调节来减轻遮挡和部分物体信息的影响,确保与源图像的几何形状和纹理精确对齐。
最后,CAST 采用了物理感知校正机制,利用细粒度关系图生成约束图,引导物体姿态的优化,确保物理一致性和空间连贯性。
实验表明,CAST 支持开放词汇重建,在遮挡管理、物体精确对齐以及与输入的物理一致性方面表现出色,为虚拟内容创作和机器人技术开辟了新的可能性。
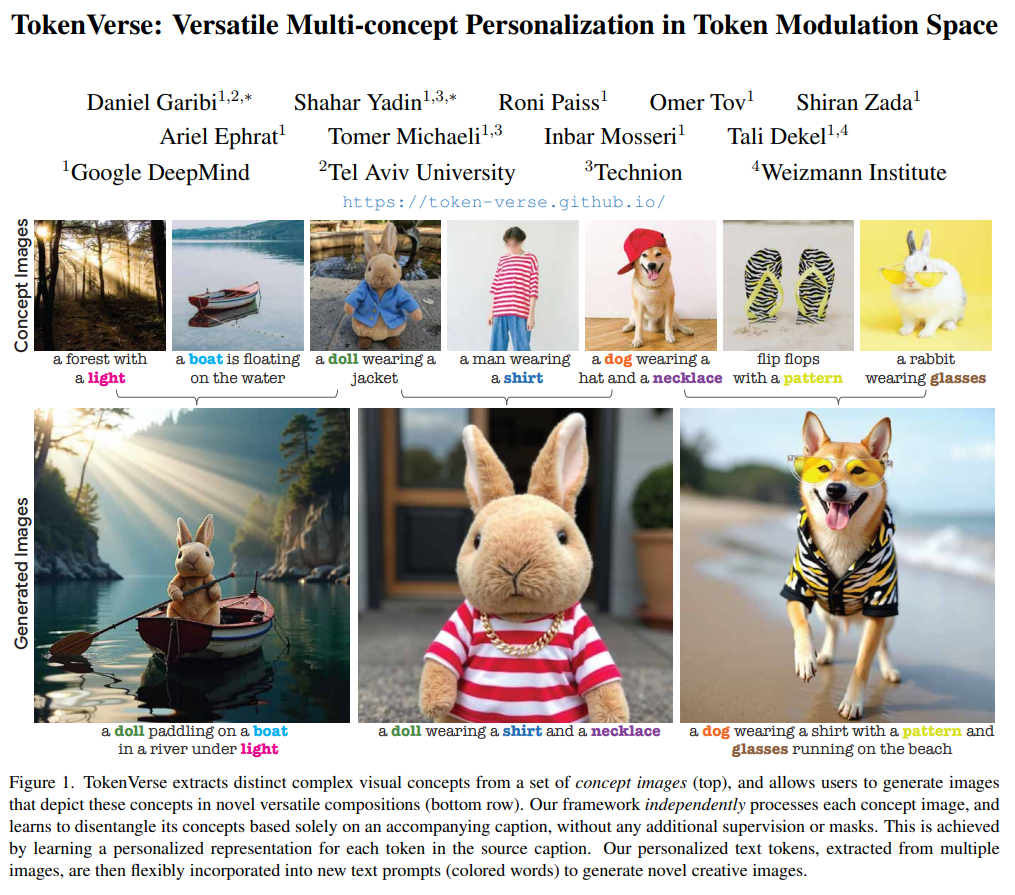
论文 3:TokenVerse: Versatile Multi-Concept Personalization in Token Modulation Space
-
论文地址:https://arxiv.org/pdf/2501.12224
-
机构:Google DeepMind 、特拉维夫大学等
-
作者:Daniel Garibi, Shahar Yadin, Roni Paiss, Omer Tov, Shiran Zada, Ariel Ephrat, Tomer Michaeli, Inbar Mosseri, Tali Dekel
论文摘要:本文提出了 TokenVerse—— 一种利用经过预训练的文本到图像扩散模型进行多概念个性化的方法。TokenVerse 可以从单张图片中分离出复杂的视觉元素和属性,同时能够无缝地即插即用地生成从多张图片中提取的概念组合。
与现有研究不同,TokenVerse 可以处理包含多个概念的多张图像,也支持物体、配件、材质、姿态和光照等广泛的概念。
论文 4:Vector-Valued Monte Carlo Integration Using Ratio Control Variates

-
论文地址:https://weschang.com/publications/vvmc/vvmc.pdf
-
机构:加州大学圣地亚哥分校、谷歌
-
作者:Haolin Lu, Delio Vicini, Wesley Chang, Tzu-Mao Li
论文摘要:方差缩减技术被广泛用于降低蒙特卡洛积分的噪声。然而,这些技术通常假设被积函数为标量值。为了解决这个问题,本文引入了比率控制变量,这是一种利用基于比率的方法而非传统的基于差分的控制变量的估计器。
论文 5:Transformer IMU Calibrator: Dynamic On-body IMU Calibration for Inertial Motion Capture
-
论文地址:https://orca.cardiff.ac.uk/id/eprint/177840/1/TIC_camera_ready.pdf
-
机构:厦门大学、伯恩茅斯大学、清华大学、加的夫大学
-
作者:Chengxu Zuo、Jiawei Huang、Xiao Jiang、Yuan Yao、Xiangren Shi、Rui Cao、Xinyu Yi、Feng Xu、Shihui Guo、Yipeng Qin
论文摘要:本文提出了一种全新稀疏惯性运动捕捉系统动态标定方法,该方法首次突破了 IMU 标定中严格的绝对静态假设,即坐标漂移𝑅𝐺′𝐺和测量偏移𝑅𝐵𝑆在整个运动过程中保持不变,从而显著扩展了其应用场景。
在该研究中,作者在两个宽松的假设下实现了𝑅𝐺′𝐺和𝑅𝐵𝑆的实时估计:i)矩阵在短时间窗口内变化可忽略不计;ii)人体运动 / IMU 读数在这样的时间窗口内具有多样性。直观地看,第一个假设减少了候选矩阵的数量,第二个假设提供了多样化的约束,这大大减少了解空间,并允许从实时的短暂 IMU 读数历史中精确估计 𝑅𝐺 ′𝐺 和 𝑅𝐵𝑆。为了实现这一点,作者创建了配对 𝑅𝐺 ′𝐺、𝑅𝐵𝑆 矩阵和 IMU 读数的合成数据集,并使用基于 Transformer 的模型学习它们的映射。他们还设计了一个基于 IMU 读数多样性的校准触发器,以确保在应用我们的方法之前满足假设 ii)。该工作是第一个实现隐式 IMU 校准、使用稀疏 IMU 实现长期精确运动捕捉的工作。
最佳论文荣誉提名
-
论文:Lifting the Winding Number: Precise Discontinuities in Neural Fields for Physics Simulation
-
作者:Yue Chang, Mengfei Liu, Zhecheng Wang, Peter Yichen Chen, Eitan Grinspun
-
论文:A Monte Carlo Rendering Framework for Simulating Optical Heterodyne Detection
-
作者:Juhyeon Kim, Craig Benko, Magnus Wrenninge, Ryusuke Villemin, Zeb Barber, Wojciech Jarosz, Adithya Pediredla
-
论文:Rectangular Surface Parameterization
-
作者:Etienne Corman, Keenan Crane
-
论文:High-Performance CPU Cloth Simulation Using Domain-Decomposed Projective Dynamics
-
作者:Zixuan Lu, Ziheng Liu, Lei Lan, Huamin Wang, Yuko Ishiwaka, Chenfanfu Jiang, Kui Wu, Yin Yang
-
论文:Variational Surface Reconstruction Using Natural Neighbors
-
作者:Jianjun Xia, Tao Ju
-
论文:Moment Bounds Are Differentiable: Efficiently Approximating Measures in Inverse Rendering
-
作者:Markus Worchel, Marc Alexa
-
论文:Clebsch Gauge Fluid on Particle Flow Maps
-
作者:Zhiqi Li, Candong Lin, Duowen Chen, Xinyi Zhou, Shiying Xiong, Bo Zhu
-
论文:Faraday Cage Estimation of Normals for Point Clouds and Ribbon Sketches
-
作者:Daniel Scrivener, Daniel Cui, Ellis Coldren, Mazdak Abulnaga, Mikhail Bessmeltsev, Edward Chien
-
论文:C-Tubes: Design of Tubular Structures From Developable Strips
-
作者:Klara Mundilova, Michele Vidulis, Quentin Becker, Florin Isvoranu, Mark Pauly
时间检验奖
今年是 SIGGRAPH 设立时间检验奖的第三年,大会对 2013-2015 年间的入选论文进行了评选,并最终选出了四篇获奖的,对业界影响深远的研究。
论文1:Unified Particle Physics for Real-Time Applications (2014)
本文提出了一个用于实时视觉效果的统一动力学框架,该框架使用通过约束连接的粒子作为基本构建块。该框架灵活地模拟气体、液体、可变形固体、刚体以及具有双向相互作用的布料。此外,它还引入了一个基于位置动力学的并行约束求解器,解决了传统基于粒子方法长期存在的计算问题。该框架已实现众多实时应用,并被广泛应用于各个领域。
-
论文链接:https://dl.acm.org/doi/10.1145/2601097.2601152
-
作者:Miles Macklin、Matthias Müller、Nuttapong Chentanez、Tae-Yong Kim
论文2:Learning Visual Similarity for Product Design With Convolutional Neural Networks (2015)
该论文是首批将现代卷积神经网络 (CNN) 引入 SIGGRAPH 的论文之一,它帮助塑造了计算机图形学的未来研究方向,并成为被广泛引用的参考文献。除了实现其核心目标 —— 在从复杂场景到孤立物体等各种图像领域进行视觉跨类别和风格感知搜索之外,它还在 CNN 训练方法和众包收集训练数据方面实现了关键的技术进步。
-
论文链接:https://doi.org/10.1145/2766959
-
作者:Sean Bell、Kavita Bala
论文3:Medial Skeleton of Point Cloud (2013)
本文介绍了一种用于三维点云的鲁棒曲线骨架表示方法,该方法无需高质量的输入或严格的几何或拓扑约束即可准确捕捉形状中心。它为工厂、道路地图、建筑、船舶分析和建模等各种应用提供了一个极具吸引力的解决方案。至今,它仍然是该领域的重要参考文献。
-
论文链接:https://dl.acm.org/doi/10.1145/2461912.2461913
-
作者:Hui Huang、Shihao Wu、Daniel Cohen-Or、Minglun Gong、Hao Zhang、Guiqing Li、Baoquan Chen
论文4:Embree:A Kernel Framework for Efficient CPU Ray Tracing (2014)
该论文介绍了 Embree 系统,并详细描述了构建专业级模块化光线追踪框架所需的条件。它以简洁优雅的架构实现了卓越的性能,并提供了一个开源实现,至今已被广泛采用。该项目至今仍在活跃,并持续造福于研究社区。
-
论文链接:https://dl.acm.org/doi/10.1145/2601097.2601199
-
作者:Ingo Wald、Sven Woop、Carsten Benthin、Gregory S. Johnson、Manfred Ernst
(文:机器之心)