

衡宇 发自 凹非寺
量子位 | 公众号 QbitAI
具身智能领域,是不是够火爆了?
但市面上常见的,大多是四足机器狗、人形机器人,机械臂……都在地上作业。
现在,一种会飞的具身智能机器人,也进入了创业商用赛道:
巴掌大小,重量约200克,搭载计算芯片和视觉方案,可负载起飞。
在没有GPS、没有信号覆盖的狭窄通道中,可以独立完成自主建图,全程无需人为干预。
且执行任务过程中的所有决策及其行为,都来自于自己的大脑,并不依靠固定流程或地面遥控。
更重要的是,N个飞行机器人还能组团干活,进行拟人化的智能协同。
所有的操作都无需人为介入。

以上,就是具身智能创业公司微分智飞正在专注做的事情。
微分智飞由浙江大学控制科学与工程学院长聘副教授、博士生导师高飞于去年底创办。两年前,他带队研发的飞行机器人蜂群就登上了《Science Robotics》封面。
带着十几年的研究积淀,高飞想把飞行机器人推向市场。今年4月,公司连续完成了两轮融资。
所以,具身智能飞行机器人和无人机,究竟有什么区别?
高飞教授向我们分享了他的思考和实践。
不是传统意义上的无人机
相信很多人都有这个疑问:飞行机器人和无人机,到底有什么区别?
高飞解释道,传统无人机本质上是被遥控的飞行器(Aircraft),依赖人的操作,比如遥控器或者地面站指令。
即使是灯光秀或预设路径配送外卖式的自动航线飞行,也是预先编程或依赖GPS等外部定位,缺乏实时自主决策。
与之相比,飞行机器人是具有自主决策能力的智能体(Agent),高度自主,能在断网的无信号环境下独立完成任务。
其灵魂是能「独立感知环境-理解任务-做出决策-闭环执行任务」,完全脱离人的实时控制。
如此说来,飞行机器人才是真正的“无人”机。

而且这套能力的核心,正是具身智能的理念:机器人必须通过与环境的互动来习得技能,才能真正具备适应性。
但高飞在这个领域的深耕比“具身智能”概念火起来要早得多。
当初在香港科技大学读博期间,他就专注于解决单机自主飞行的核心挑战,即实现无人机从起点到终点的全程无人干预自主飞行。
高飞的博导给他布置了一个任务:
做一台飞行机器人,在实验室门口一键起飞,全程无人干预,自动飞到学校门口。
什么时候做出来什么时候毕业。
那时候还没有大模型,更别提落实具身智能。
为了实现真正的自主飞行,高飞依赖的是一整套高度耦合的工程体系:多传感器融合、精确建模、低功耗嵌入式算法……所有计算都得跑在资源极有限的硬件上,必须极致优化,才能撑起整个系统闭环。
据高飞讲述,那时候走的是一条更工程理性的路径,需要依赖精确的数学模型、传感器融合、系统控制理论,从而构建稳定可靠的功能性闭环。
但不变的是一种观点——飞行机器人必须靠自身感知获取环境信息、必须实时闭环决策(而不是靠远程规划)、必须在不确定性中适应性执行。
这些思想,与后来具身智能范式的底层逻辑不谋而合。

后来,具身智能兴起,它强调通过身体交互获得智能。高飞觉得这也是让飞行机器人实现智能的一种途径,于是也因此开始侧重数据驱动的学习。
后期的飞行机器人集群研究中,高飞开始引入强化学习训练协同策略,在仿真环境中训练无人机完成任务策略。但相关的底层定位、控制等仍以传统方法为主。
总而言之,现在仍然抛不开传统方法——
很多人会以为,要实现这样的智能必须依赖大模型。但高飞的看法是,大模型更多是在上层帮助理解复杂任务,比如“帮我找一束花”“判断哪块区域有危险”。
而让机器人能真的飞起来、飞得准、飞得稳的,依然靠的是底层的感知、算法和控制力。
这才是飞行机器人的基础工程能力。
巴掌大的飞行机器人,是一种“炫技”
一般而言,飞行机器人具有以下几个关键部件:
- 大脑:上位机,负责环境感知、自主定位、实时规划、任务决策等
- 小脑:下位机,负责运动协调、姿态稳定控制,执行高频、实时任务
- 肢体:螺旋桨
- 眼睛:摄像头/雷达等传感器
以此为硬件基础,高飞创业的微分智飞,有以下三大技术特色:
第一,极强的自主决策能力。这一点通过算法来实现。
无GPS、无信标、无遥控,全靠传感器融合定位、动态避障算法与运动规划,高飞团队在非结构化场景(如矿山、林下、隧道)完成首创全自主飞行。
高飞介绍,下发任务指令后,全程无需实时信号(可断连),飞行机器人能自行维护环境地图、计算最短返航路径,并能在电量临界点前自动返航。
在此过程中,飞行机器人需要智能决策最优路径,譬如探索完一个房间再出去,避免反复进出。
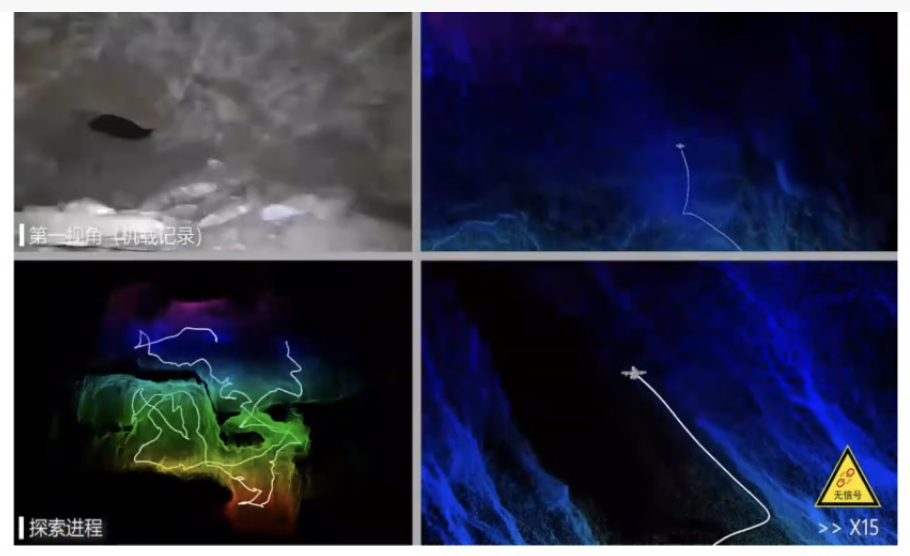
飞行机器人返航后,可提取全部采样数据。
第二,高效协同的集群技术。
早期在港科大解决单体自主导航的高飞,进入浙大后开始研究集群协同。
他的目标是实现类似人类集群——如军训走方阵——的分布式智能协同,而非无人机灯光秀式的集中控制。
这其中的主要难点,是集群中的每一个飞行机器人既需要个体需足够自主智能,协同时又要高效沟通、分工,不能起冲突。

高飞团队给出的解决办法是“集中式学习,分布式运行”。
在高保真仿真环境中,数万乃至数十万智能体围绕同一全局目标进行集中式学习,以更高效地习得协同决策策略;与此同时,通过随机扰动环境参数、感知噪声和场景纹理,使模型的适应性不断增强。
在训练过程中,团队预先设计了可变规模机制以适应实际操作中集群规模的动态变化,并将强化学习与传统控制相结合,最大限度缩小仿真与现实之间的迁移差距,从而显著提升算法在复杂场景中的泛化能力与可靠性。
第三,小型化与硬件集成颇有积淀。
微分智飞的特色就是专注做小型飞行机器人,最小的那一款只有巴掌大小。
因为小,在很多人类不能进入的环境下,能够灵活地飞行并完成任务。
也是因为小,飞行机器人传感器变弱、计算资源受限、续航变短,各方面载荷受限,对算法效率、模型轻量化、软硬件集成度要求极高,有很高的技术门槛。这就离不开高飞在这个领域10余年的积累。
如果在这种条件下还能实现自主智能,那就是真正的把难题解决到极致。高飞表示:
它需要的不只是能飞,同时还要在成本、可靠性、安全性上具备产品化能力。
“不想再手搓了!”
目前,微分智飞共有两条产品线,三款在研机型。
一条行业线,也是公司的产品线主力,主要用于自主探测建图与巡检。
计划2025年年内推出2款产品,轴距25-35公分左右,续航>40分钟。
一条教育线,提供开放、标准可开发平台,可二次开发。
主要目的是创建教育科研生态,降低学生手搓门槛。
迄今为止,高校学生或科研人员还没有这样的生态环境可用,如有需要,只能手搓——而且是非标准化、高成本、强依赖个人技能的那种。
飞控主板、传感器、动力系统、结构件……没有统一供应链,学生需自行从不同渠道采购零件。
不仅来源零散,小批量加工成本还高,采购的零件要么无冗余要么过剩。用高飞的话来说,“100个起售,但买100个最后只用得上2个”。

除此外,软件层面基本都基于开源飞控二次开发,但开源代码碎片化,调试耗时。
综上所述,其实教育线产品的目标很明确:
要把高校“人人手搓飞行机器人”的局面变成“标准平台+自主开发”的常态。
其实,高飞做这件事也算是一种还愿——
他从小就是个航空爱好者,最大的梦想是开战斗机。后来没能飞上天,就转而研究飞行机器人,把自己对飞行的执念灌注进小小的机器中。
高飞回忆自己当年在实验室里手搓机器的日子:一个部件画图加工就要等一周,炸机一次成本几千,还时常因为缺资料耽误实验。现在,他希望给后来的科研学生提供更好的起点。

但对高飞来说,仅仅搞科研、发论文是不够的。
他清楚地知道实验室成果如果不能走向市场,那就是差了一环。因此,他选择创业。
不只是为了把技术落地,更是为了把飞行机器人这条技术链真正闭合走向落地。
现阶段,微分智飞的主要策略是专注产品,不把自己变成服务型公司。
尽管To B场景里很多客户更愿意为服务买单,但高飞坚持产品优先、技术闭环的路径。
虽有十多年的科研积累,但形容这段创业经历时,高飞用了个词叫“进化”。
他说,科研人做公司,得找到互补的合伙人,同时从头学产品、学市场、学成本控制,从算法理论到芯片选型,从论文逻辑到供应链周期,每一步都得亲手趟过去。
我和团队都有短板。但只要清醒、愿意学,就有机会把技术真正做成产品,把实验室的极致推向真实市场。
— 完 —
📪 量子位AI主题策划正在征集中!欢迎参与专题365行AI落地方案,一千零一个AI应用,或与我们分享你在寻找的AI产品,或发现的AI新动向。
💬 也欢迎你加入量子位每日AI交流群,一起来畅聊AI吧~
一键关注 👇 点亮星标
一键三连「点赞」「转发」「小心心」
欢迎在评论区留下你的想法!
(文:量子位)