

机器之心编辑部
恭喜获奖者。
RSS(Robotics: Science and Systems,机器人科学与系统会议)是机器人领域顶级学术会议,自 2005 年起每年举办一次,该会议旨在促进机器人领域的科学研究和技术应用的发展。
今年大会已于 6 月 21 日至 25 日在美国洛杉矶举行。杰出 Demo 论文奖、杰出系统论文奖、杰出学生论文奖、杰出论文奖多个奖项已经公布。
地址:https://roboticsconference.org/program/awards/
杰出 Demo 论文奖
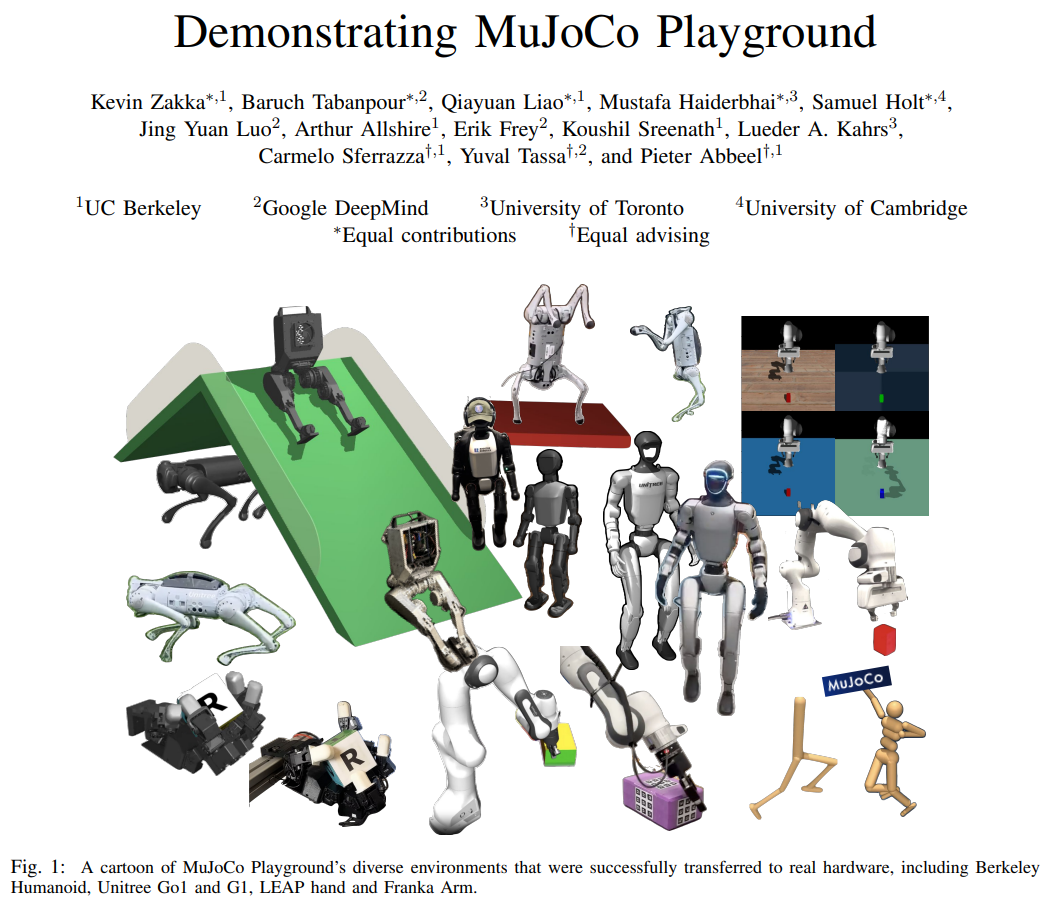
论文标题:Demonstrating MuJoCo Playground
-
论文链接:https://www.roboticsproceedings.org/rss21/p020.pdf
-
论文主页:https://playground.mujoco.org/
-
机构:UC 伯克利、Google DeepMind、多伦多大学、剑桥大学
-
作者:Kevin Zakka, Baruch Tabanpour, Qiayuan Liao, Mustafa Haiderbhai, Samuel Holt, Jing Yuan Luo, Arthur Allshire, Erik Frey, Koushil Sreenath, Lueder Alexander Kahrs, Carmelo Sferrazza, Yuval Tassa, Pieter Abbeel
论文摘要:该研究提出了 MuJoCo Playground—— 这是一个基于 MJX 构建的完全开源机器人学习框架,其核心设计目标是大幅简化仿真环境搭建、模型训练以及仿真到现实场景的迁移全流程。研究人员仅需执行简单的「pip install playground」安装命令,即可在单 GPU 硬件上完成分钟级策略训练。
该框架支持四足机器人、人形机器人、灵巧手及机械臂等多类型机器人平台,能够直接基于状态观测或像素级输入实现零样本仿真到现实迁移。
这一突破性成果依托于高度集成的物理引擎、批量渲染器与训练环境技术栈。
四足机器人

人形机器人

机器人跌倒又恢复
杰出系统论文奖
论文标题:Building Rome with Convex Optimization

-
论文地址:https://arxiv.org/pdf/2502.04640
-
论文主页:https://computationalrobotics.seas.harvard.edu/XM/
-
机构: 哈佛大学
-
作者:Haoyu Han、Heng Yang
论文摘要:该研究 (i) 提出了一种名为 SBA(scaled bundle adjustment)的公式,其利用学习到的深度将二维关键点测量提升到三维;(ii) 该研究还设计了一个经验上紧致的凸半有限规划 (SDP) 松弛函数,用于求解 SBA 并达到可验证的全局最优解;(iii) 该研究使用 Burer-Monteiro 分解和基于 CUDA 的信赖域黎曼优化器(简称 XM)求解极端规模的 SDP 松弛问题;(iv) 构建了以 XM 为优化引擎的运动结构 (SfM) 流程,并展示了 XM-SfM 在重建质量方面优于现有流程,同时速度显著提升、可扩展性更强且无需初始化。

XM 是一款功能强大且可扩展的优化引擎,专为大规模 SfM(Structure-from-Motion)任务而设计。该动图展示了其在短短一小时内高效求解 10,155 帧并达到全局最小值的能力。

重建结果(左)与来自 Replica 数据集的输入图像(右)。
杰出学生论文奖
论文标题:Solving Multi-Agent Safe Optimal Control with Distributed Epigraph Form MARL
-
论文地址:https://arxiv.org/pdf/2504.15425
-
论文主页:https://mit-realm.github.io/def-marl/
-
机构:MIT
-
作者:Songyuan Zhang, Oswin So, Mitchell Black, Zachary Serlin, Chuchu Fan
论文摘要:多机器人系统通常要求机器人能够协作完成团队目标,并确保安全性。该问题通常被形式化为一个受约束的马尔可夫决策过程(CMDP),其目标是最小化全局代价,并将约束违反的平均值控制在用户设定的阈值以下。
受现实世界机器人应用的启发,该研究将安全性定义为「零约束违反(zero constraint violation)」。
此外,该研究还采用约束优化的 epigraph 形式来提升训练稳定性,并由此提出名为 Def-MARL 的新型「集中训练 – 分散执行」多智能体强化学习算法。

在两种不同模拟器的 8 项任务测试中,Def-MARL 不仅整体性能最优、满足安全约束,还保持了稳定的训练过程。通过 Crazyflie 四旋翼飞行器的实体实验进一步证明:相较于其他方法,Def-MARL 能更安全地协调智能体完成复杂协作任务。
穿越狭窄走廊
协作检查目标
杰出论文奖
论文标题:FEAST: A Flexible Mealtime-Assistance System Tackling In-the-Wild Personalization
-
论文地址:https://www.roboticsproceedings.org/rss21/p083.pdf
-
论文主页:https://emprise.cs.cornell.edu/feast/
-
机构:康奈尔大学、密西根大学等
-
作者:Rajat Kumar Jenamani, Tom Silver, Ben Dodson, Shiqin Tong, Anthony Song, Yuting Yang, Ziang Liu, Benjamin Howe, Aimee Whitneck, Tapomayukh Bhattacharjee
论文摘要:物理看护机器人有望改善全球数百万需要帮助喂养的人的生活质量。然而,由于在部署过程中出现的活动(例如,吃饭、喝水、擦嘴)、环境(例如,社交、看电视)、食物和用户偏好的多样性,家庭用餐辅助机器人仍然面临极大的挑战。
该研究提出了 FEAST—— 一个灵活的进餐辅助系统,可在真实环境中进行个性化调整,以满足对照护对象的特殊需求。
系统设计遵循三大原则:适应性、透明性与安全性。FEAST 系统通过以下方式践行这些原则:(一)采用模块化硬件设计,可灵活切换辅助进食、饮水与擦嘴功能;(二)提供包括网页界面、头部姿势识别和实体按钮在内的多样化交互方式,以适应不同用户的功能需求与使用偏好;(三)运用参数化行为树架构,支持通过大语言模型进行安全透明的个性化调整。
结果表明:与仅限于固定定制的最先进基线系统相比,FEAST 能提供更广泛、透明且安全的泛化功能。
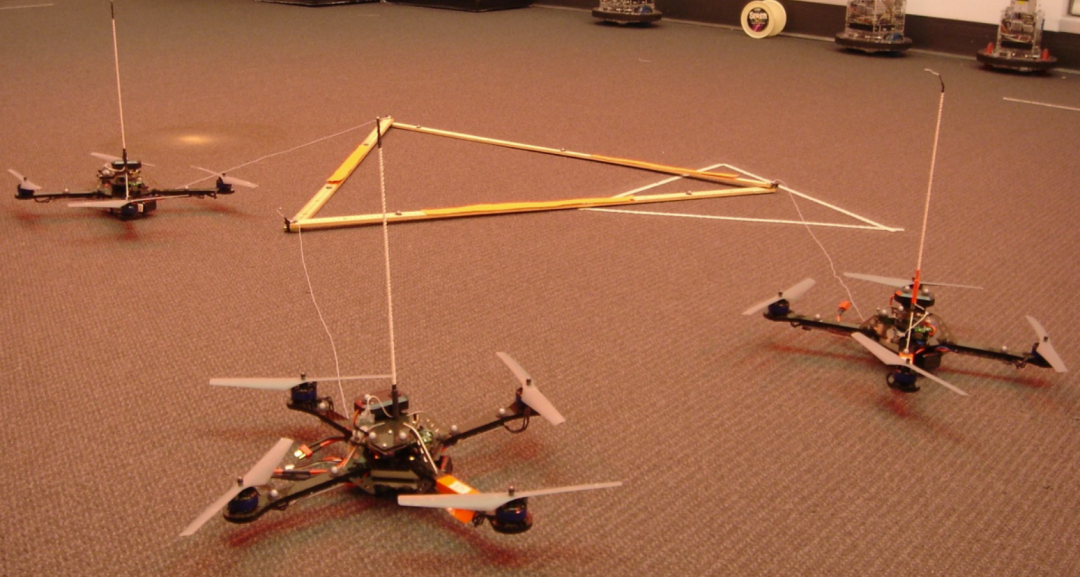
另外,RSS 2025 时间检验奖(Test of Time Award)论文也已经公布:Nathan Michael、Jonathan Fink 和 Vijay Kumar 于 2009 年发布的《Cooperative Manipulation and Transportation with Aerial Robots》。
论文地址:https://www.roboticsproceedings.org/rss05/p1.pdf
该论文探讨了控制多个机器人通过线缆在三维空间中操纵和运输有效载荷的问题,其中开发了用以确保有效载荷在期望姿态下保持静态平衡的机器人配置,同时兼顾张力约束,并对这些配置的有效载荷稳定性进行了分析。该团队也执行了模拟和实验,在一组空中机器人上演示了新提出的方法。
(文:机器之心)