


北京航空航天大学联合华为 2012 实验室发布了一项名为 BIGCity 的时空大模型。提出了了一种统一轨迹和交通状态预测任务的新范式。
本文第一作者为北京航空航天大学计算机学院博士生于勰,本文的通讯作者为北京航空航天大学计算机学院教授王静远。
目前该研究已被 ICDE 2025 正式接收,相关代码与模型已经全部开源。
论文标题:
BIGCity: A Universal Spatiotemporal Model for Unified Trajectory and Traffic State Data Analysis
论文链接:
https://www.computer.org/csdl/proceedings-article/icde/2025/360300e455/26FZCDlNR9m
代码链接:
https://github.com/bigscity/BIGCity
接收会议:
ICDE 2025 (CCF A 类)
单位:
北京航空航天大学计算机学院,华为 2012 实验室

研究背景
在智慧城市与智能交通系统的研究中,构建统一的时空大模型面临数据异质性与任务多样性的双重挑战。
传统时空分析范式将轨迹数据(个体移动序列)与交通状态数据(群体流动特征)视为独立研究对象:前者以地理单元序列(如道路段 ID 序列,GPS 点)表征个体移动轨迹,后者以动态图结构(路网节点速度矩阵)描述交通流宏观状态。这种割裂导致两类核心问题:
1. 表示鸿沟问题:轨迹数据的离散序列表示(如 GPS 点序列)与交通状态数据的连续图表示(如路段速度场)存在本质语义差异,传统模型难以构建统一特征空间
2. 任务异构瓶颈:实际应用中常需同时处理分类(如轨迹下一点预测)、回归(如行程时间估计)、生成(如缺失轨迹补全)等多任务,传统模型需针对不同任务单独设计网络结构。
不同的任务存在复杂时空依赖关系,包括路网拓扑的静态约束(如道路连通性)、交通流的动态演化(如早高峰拥堵传播)以及个体移动的行为模式(如通勤规律),现有模型难以同时处理多种异构的时空任务。
为了解决上述挑战,北京航空航天大学与华为联合提出的 BIGCity 模型(Bidirectional Interactive Generalized City Model)首次构建了面向多模态时空数据的统一分析框架,通过统一时空表示体系与任务导向提示机制实现了轨迹与交通状态数据的联合建模。

研究动机
本文的创新点在于使用一个统一模型同时处理“轨迹类任务”和“交通状态类任务”。像导航应用这样的实际场景通常同时依赖这两类数据——用户既需要交通状态的预测,也需要最优路径的推荐(即轨迹)。
从本质上来说,交通状态是由个体轨迹汇聚而来的,因此将二者进行融合有助于提升模型性能。然而,这一点在以往的研究中常被忽视,而我们的工作正是填补了这一空白。
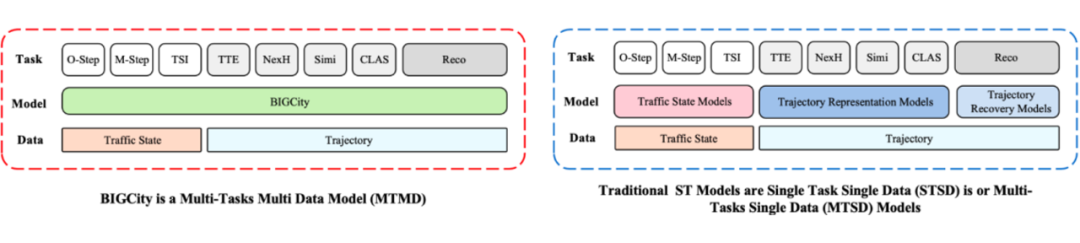
如图所示,BIGCity 是一个多任务多数据(MTMD)模型。交通状态类任务包括一步预测(O-Step)、多步预测(M-Step)和交通状态补全(TSI);轨迹类任务包括行程时间估计(TTE)、下一跳预测(NexH)、相似轨迹检索(Simi)、轨迹分类(CLAS)以及轨迹重建(Reco)。

模型方法
BIGCity 主要包含以下三个核心模块:
1. 统一的时空数据表示方法(ST-Unit & ST tokenizer)
2. 面向任务的 Prompt,用于适配多样任务(Task-oriented Prompt)
3. 统一的训练策略(Unified Training Strategy)
3.1 统一的时空数据表示方法
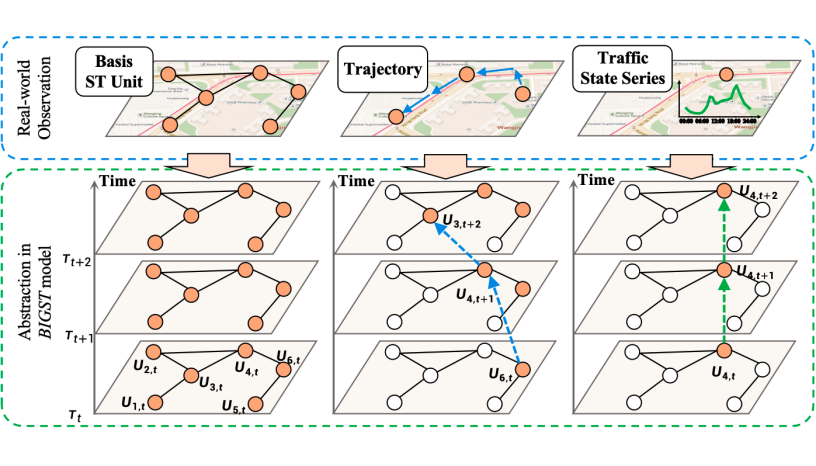
我们提出了 STUnit 和 ST tokenizer 两个核心组件。城市中的多源异构数据通常都基于道路网络,每个节点包含静态道路信息和动态交通状态。
轨迹数据和交通状态本质上都是从动态道路网络中采样得到的序列,二者的主要差异在于采样方式。因此,我们设计了 STUnit,将轨迹和交通状态统一表示为序列形式。
基于 ST-Unit,我们进一步设计了 ST tokenizer 来统一表示道路网络。如下图所示,ST tokenizer 包含静态编码器和动态编码器,分别建模静态和动态特征。同时,融合编码器用于整合两者,生成动态的道路网络表示。
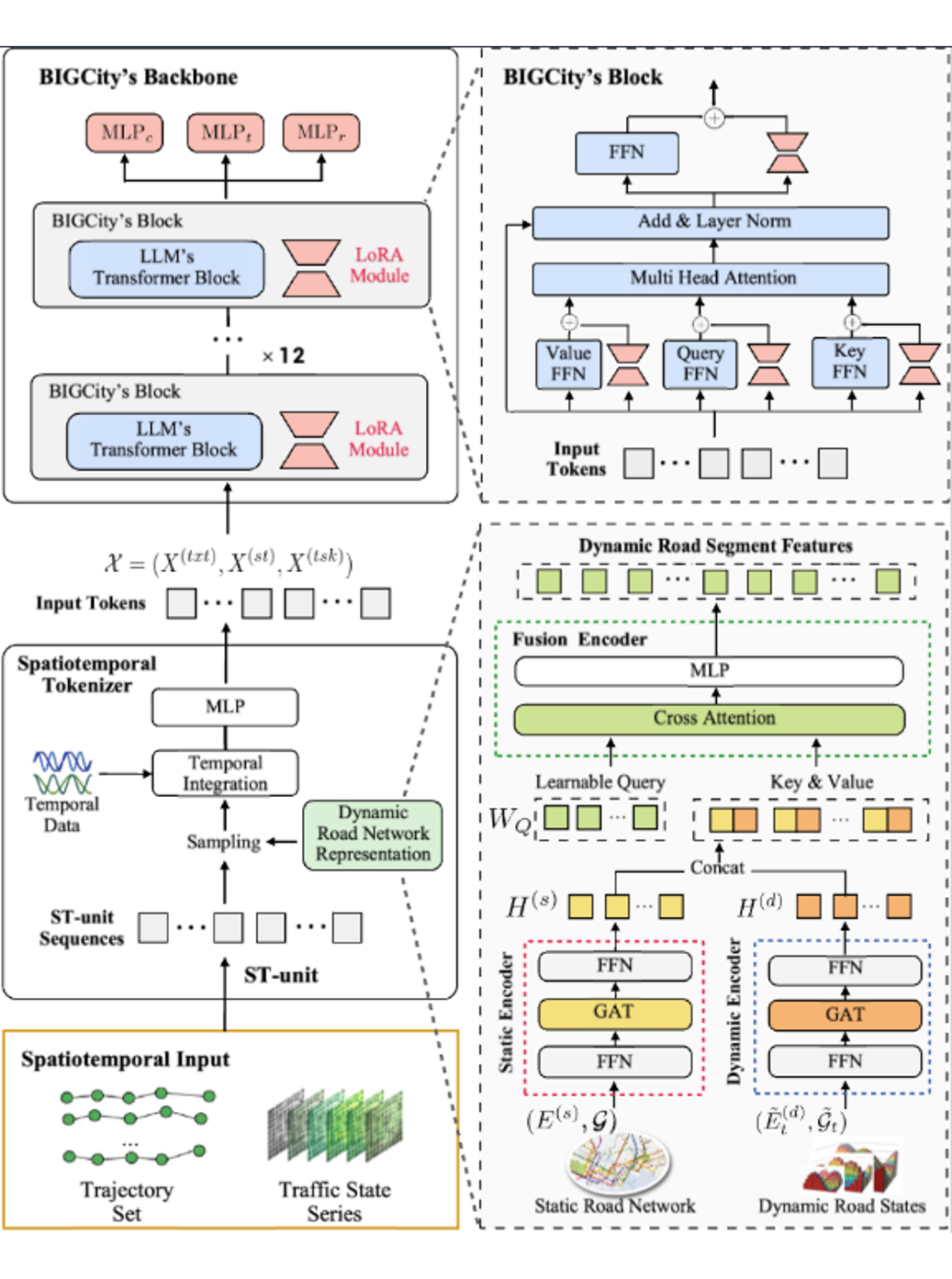
通过整合 STUnit 和 ST tokenizer,轨迹与交通状态都可被统一为特征序列,进而以序列建模的方式统一训练。考虑到 GPT-2 在序列建模方面的强大能力,我们选择其作为模型的主干架构。
3.2 面向任务的 Prompt
由于不同任务可能共享相同的时空输入,仅依赖数据难以判断具体任务类型。为此,我们引入了面向任务的 Prompt,用作任务标识符。在该机制下,不同的时空任务数据可统一整合为一个数据集,实现联合训练。
具体而言,我们首先将时空任务划分为四类(如下表所示),其输出形式可归纳为两类:1. 静态离散的道路段 ID 分类;2. 动态连续特征的回归。
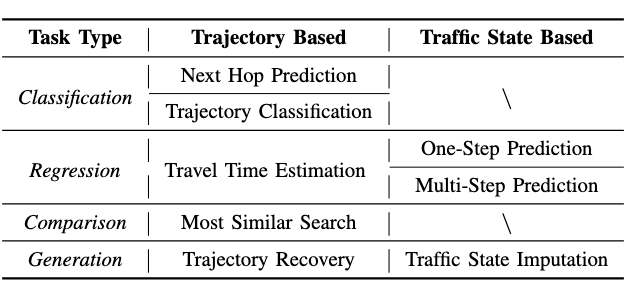
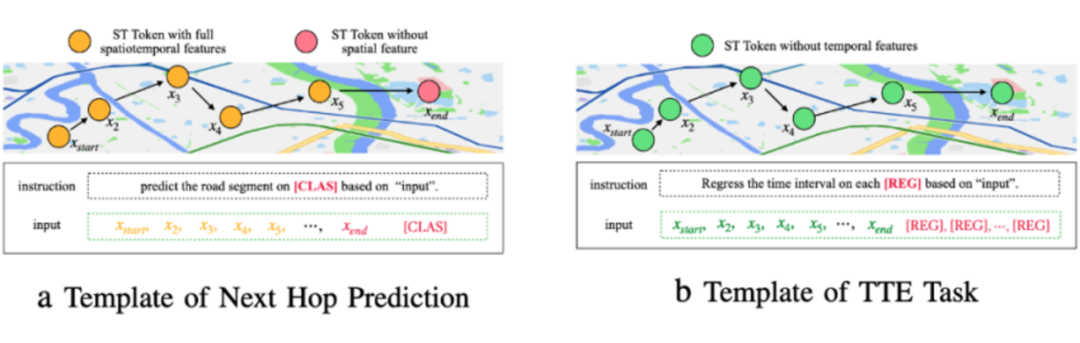
因此,我们定义了任务占位符 [CLAS] 表示分类任务,[REG] 表示回归任务。该占位符不仅标识任务类型,也标明每个任务的输出形式与维度。此外,我们为每个任务设计了专属的 Prompt 模板,用于明确任务类型。相关模板示例如图所示。

3.3 模型训练(第六节)
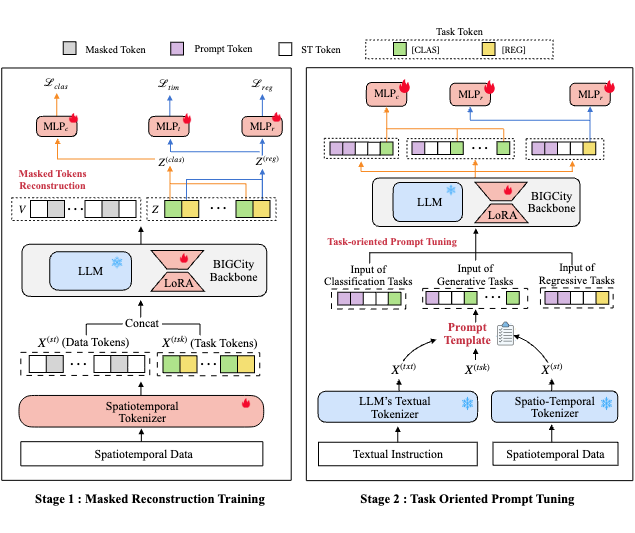
如下图所示,BIGCity 采用两阶段训练策略:
1. 掩码重建训练:在该阶段,仅输入 ST 数据与任务占位符,训练模型生成通用时空表示;
2. 面向任务的 Prompt 微调:引入任务 Prompt 后,对模型进行多任务联合微调,从而具备多任务能力。

实验验证
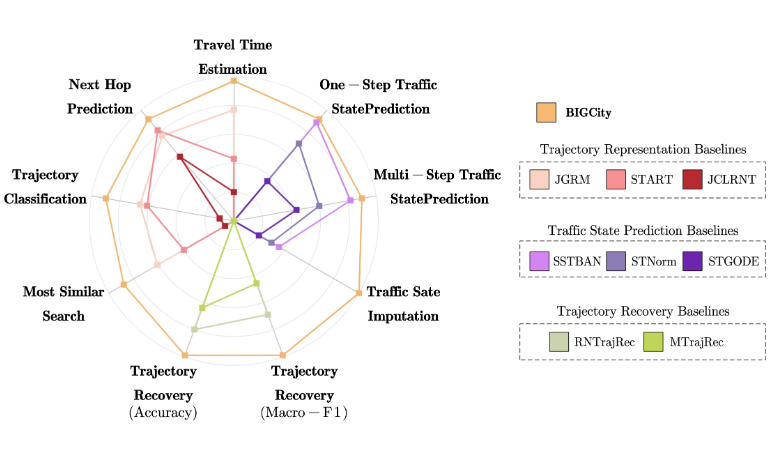
多任一模:BIGCity 在三个不同的城市,4 类 8 种不同的任务上进行了广泛的验证。实验结果表明,在 8 种不同的任务上,BIGCity 普遍超越了当前 18 种不同的 task-specific 模型并取得 SOTA 的性能。
跨城市泛化:将在 BJ 数据集训练的 BIGCity 模型迁移到 XA 和 CD 数据集,仅微调 tokenizer 的最后 MLP 层。
结果显示,BIGCity-BJ 与原始模型相比平均性能下降在 7% 以内,且在大多数情况下仍优于所有基线模型,证明了其出色的跨城市泛化能力。
实验表明,BIGCity 可在数据丰富的大城市预训练,再迁移到数据有限的小城市,为实际应用中的跨区域部署提供了可能。
可扩展性:随着 BJ 数据集规模扩大,BIGCity 在轨迹分类、搜索和恢复等任务上的性能持续提升,且在大规模推理场景中保持稳定,展现出对大规模数据的有效利用和鲁棒性。

结论与展望
本文提出了 BIGCity 模型,整合了异构的时空数据与异构的时空任务,实现了对轨迹和交通状态数据的多任务多模态分析。
BIGCity 具有强大的多任一模能力,在 8 个任务上超越 18 个基线模型,展现了优异的性能和泛化能力。未来期望纳入 POI、网格等更多元的时空要素,以进一步拓展模型的应用场景和分析能力。
指导教师:
王静远教授(https://www.bigscity.com/jingyuan-wang/)
课题组:
北京航空航天大学计算机学院 BIGSCITY实验室(https://www.bigscity.com/)
实验室长期招聘青年教师、博士后,招收博士研究生以及实习生。有意者请联系 jywang@buaa.edu.cn

论文引用地址:
@INPROCEEDINGS {bigcity,
author = { Yu, Xie and Wang, Jingyuan and Yang, Yifan and Huang, Qian and Qu, Ke },
booktitle = { 2025 IEEE 41st International Conference on Data Engineering (ICDE) },
title = {{ BIGCity: A Universal Spatiotemporal Model for Unified Trajectory and Traffic State Data Analysis }},
year = {2025},
volume = {},
ISSN = {2375-026X},
pages = {4455-4469},
abstract = {},
keywords = {spatiotemporal data;universal model;trajectory;traffic state},doi = {10.1109/ICDE65448.2025.00334},
url = {https://doi.ieeecomputersociety.org/10.1109/ICDE65448.2025.00334},
publisher = {IEEE Computer Society},
address = {Los Alamitos, CA, USA},
month =May}
(文:PaperWeekly)