
 机器人大讲堂
机器人大讲堂


Science Advances发表!南洋理工大学推出头发丝薄度传感器FMEIS,让机器秒懂肌肉「微表情」
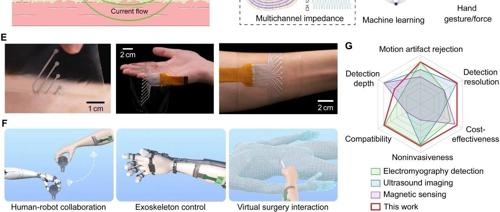
随着人机界面(
HMI)在家庭机器人、康复外骨骼以及远程医疗等领域的不断拓展和广泛应用,
市场对于能

Mech. Mach. Theory发表!南京航空航天大学团队打造新一代踝关节康复“机器人助手”,性能更强更安全!

功能至关重要,可以有效地促进踝关节康复,增强韧带弹性和防止关节粘连。但传统人工康复过程漫长且效果难以
软体机器人新突破!用剪纸原理造出的充气爬行机器人可穿越各种复杂地形
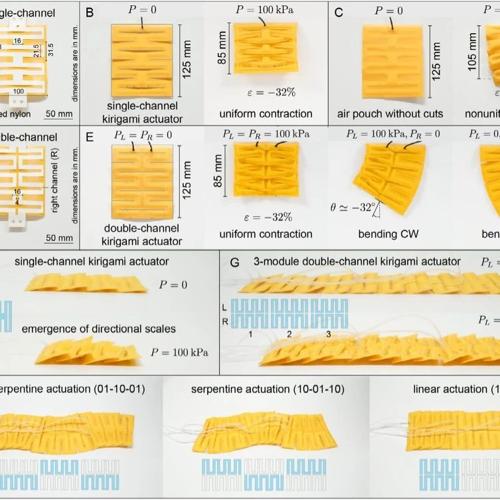
南丹麦大学团队开发出基于剪纸原理的充气式软体爬行机器人,在各种复杂地形上实现高效移动。这种机器人由柔性材料制成,通过巧妙设计和气动控制模拟蛇类运动。
从抓薯片到玩手机,这款传感器凭什么让灵巧手通吃全场景抓取?

苏州航凯微电子技术有限公司推出多模态触觉传感器,克服传统薄膜压力传感器局限性,让机器人灵巧手能够精准感知外部世界。该传感器具有高精度测量、多模态感知、快速响应和性能稳定等优势,在工业抓取、精密操作等领域展现出强大环境感知能力与广泛场景适配性。
1ms,埃斯顿ERI实时控制解决方案,打造机器人高端应用壁垒!

埃斯顿在Automatica展会上展示了ERI实时控制方案,旨在提升工业机器人的工艺细节和适应复杂应用场景的能力。ERI作为高级接口解决方案,提供实时控制功能和标准化接口,助力用户实现灵活路径规划、数据流引擎等需求。