



-
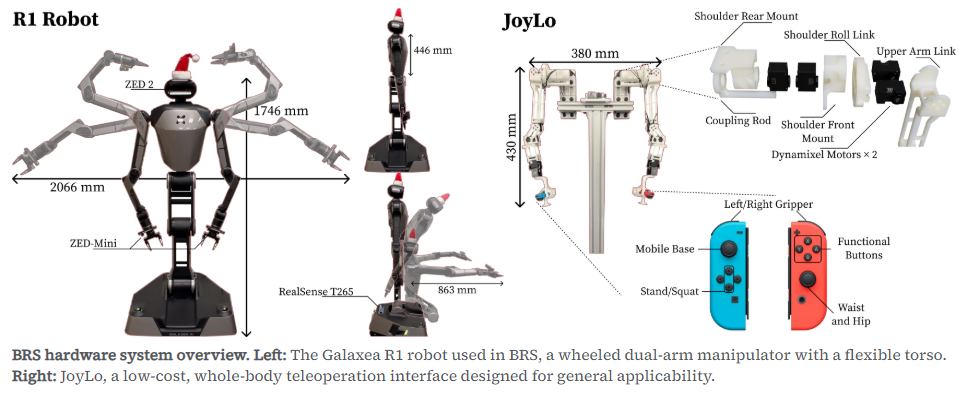
JoyLo(Joy-Con on Low-Cost Kinematic-Twin Arms);
-
WB-VIMA(Whole-Body VisuoMotor Attention)。
-
高效的全身协调控制系统,实现复杂动作的流畅衔接;
-
丰富的用户反馈机制,带来直观的远程操作体验;
-
确保高质量的示范动作,提升策略学习效果;
-
低成本实现方案,大幅提高系统可及性;
-
实时、便捷的控制器设计,确保操作无缝顺畅。
-
物料清单地址:https://behavior-robot-suite.github.io/docs/sections/joylo/overview.html#bill-of-materials-bom
-
组装说明:https://behavior-robot-suite.github.io/docs/sections/joylo/step_by_step_assembly_guidance.html
-
Q1:BRS 支持哪些类型的家庭任务?
-
Q2:JoyLo 与其他方法相比表现如何?
-
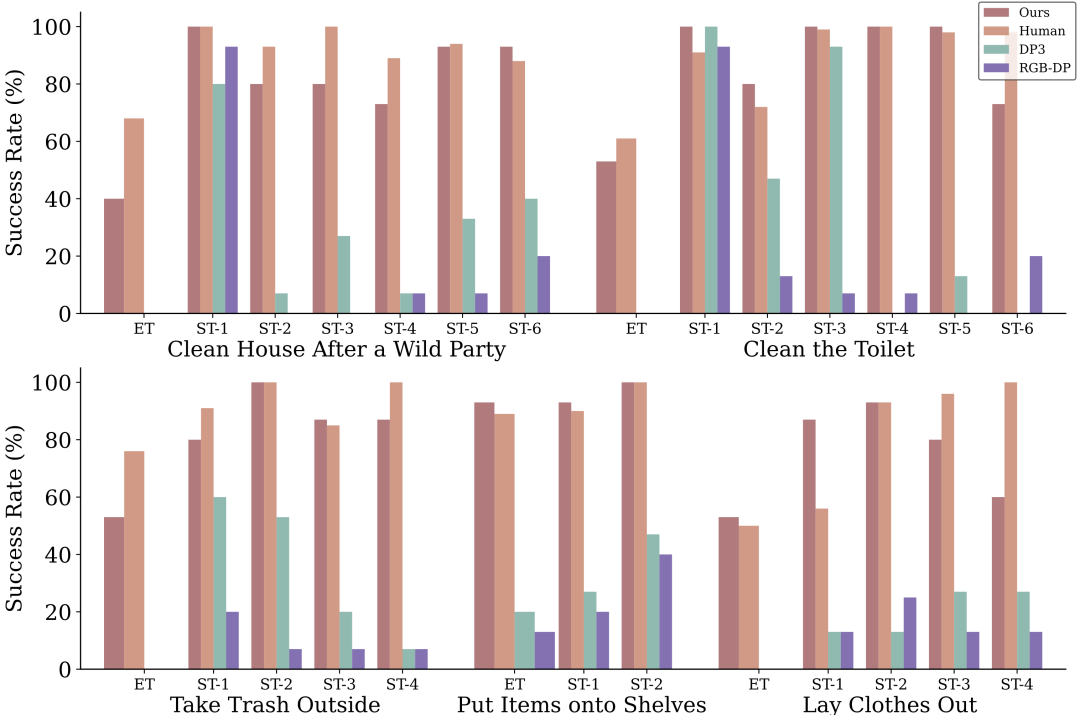
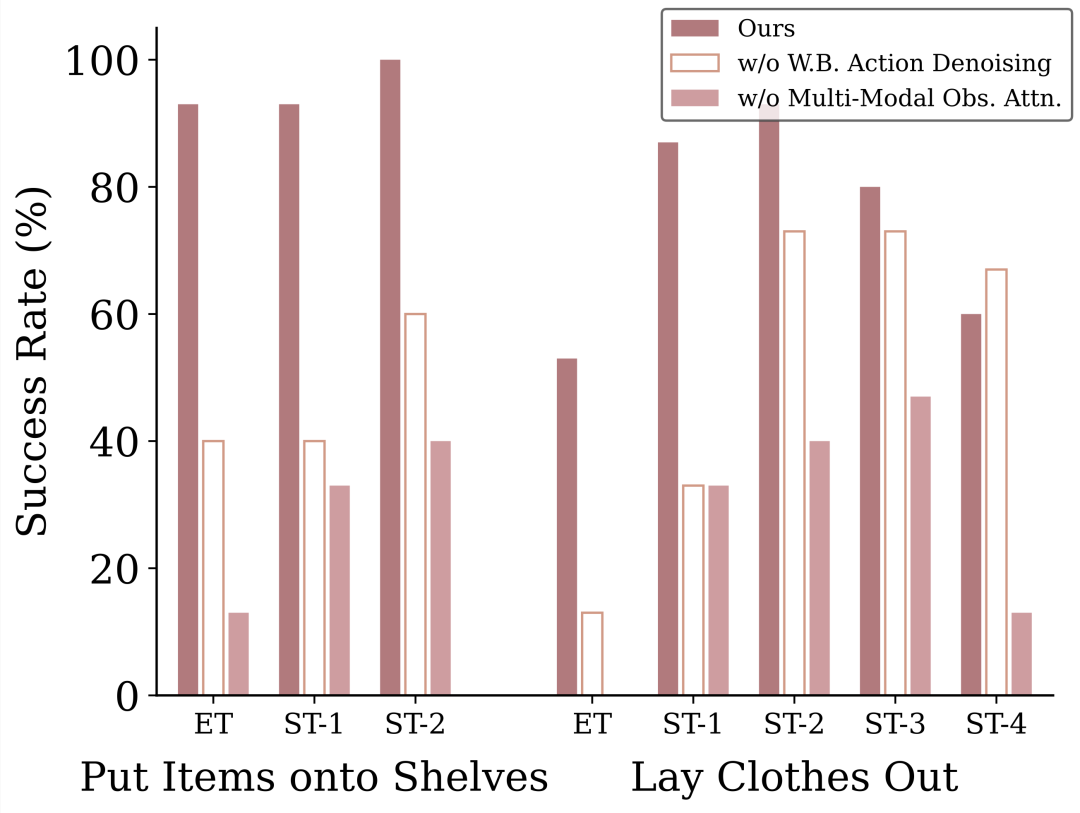
Q3:WB-VIMA 是否优于基线方法?
-
Q4:哪些组件促成了 WB-VIMA 的有效性?
-
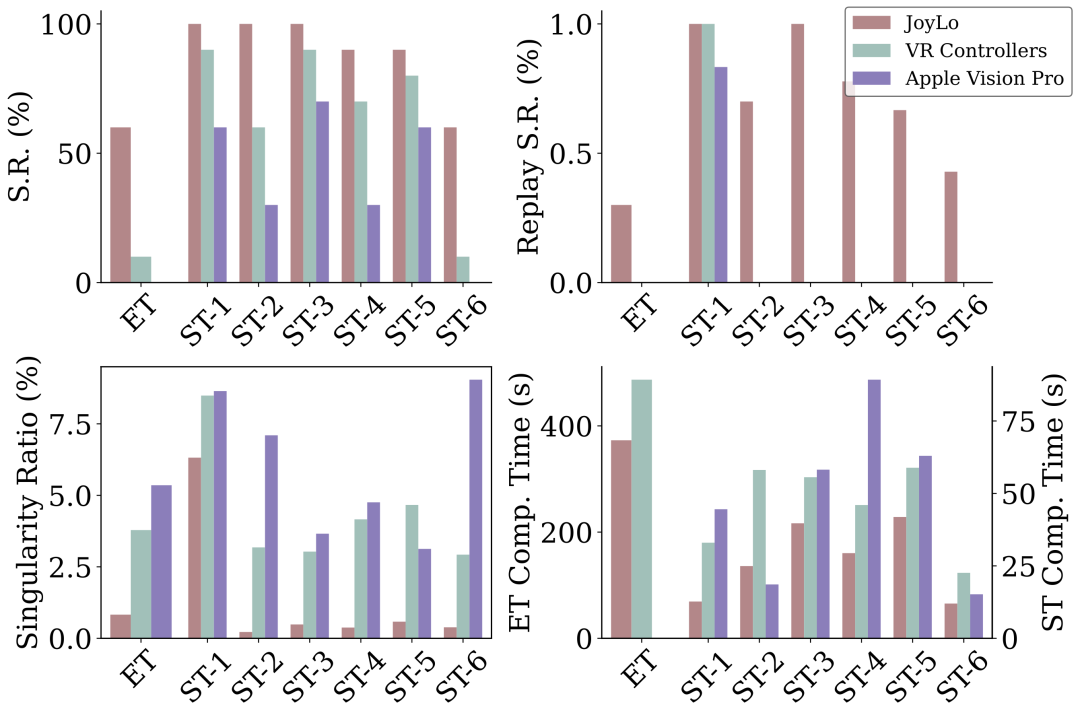
JoyLo 整体任务成功率是 VR 控制器的 5 倍(Apple Vision Pro 无人完成全任务);
-
中位完成时间较 VR 控制器缩短 23%;
-
在铰接物体操作等精细任务中表现突出。
-
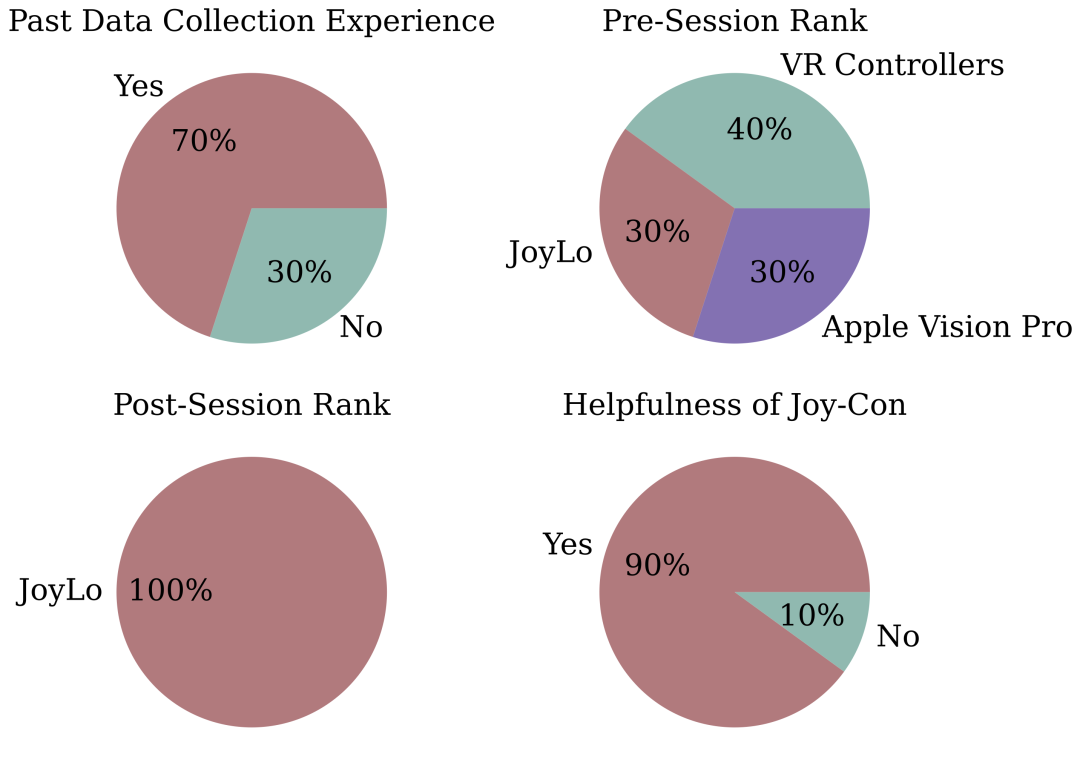
所有参与者最终评价 JoyLo 为最友好交互;
-
70% 用户最初认为 IK 更直观,但实操后偏好逆转;
-
用户反馈 IK 方法在移动底座 / 躯干控制上存在显著困难。

(文:机器之心)