【新智元导读】OpenGS-SLAM是一种新的RGB-only SLAM系统,专门用于无界户外场景。它通过点图回归网络和3D高斯分布(3DGS)表示,实现了精准的相机定位和高保真的场景重建,显著提升了跟踪精度和新视角合成的效果。
在自主驾驶、机器人导航、AR/VR等前沿应用中,Simultaneous Localization and Mapping (SLAM) 是核心技术之一。
现有基于3D高斯分布(3DGS)的SLAM方法虽在室内场景表现出色,但使用仅RGB输入来处理无界的户外场景仍然面临挑战:
为了解决上述挑战,港科广团队提出全新解决方案OpenGS-SLAM,仅凭RGB图像实现高精度定位与逼真场景重建。

论文链接:https://arxiv.org/abs/2502.15633
代码链接:https://github.com/3DAgentWorld/OpenGS-SLAM
官方主页:https://3dagentworld.github.io/opengs-slam/
具体来说,该方法采用了一个点图回归网络来生成帧间一致的点图,储存了来自多个标准视角的3D结构,包含了视角关系、2D到3D的对应关系和场景几何信息,使得相机位姿估计更加稳健,有效缓解了预训练深度网络的误差问题。
此外,将相机位姿估计与3DGS渲染集成到一个端到端可微的管道中,实现了位姿和3DGS参数的联合优化,显著提高了系统的跟踪精度。
文中还设计了一种自适应比例映射器和动态学习率调整策略,能够更准确地将点图映射到3DGS地图表示。
值得注意的是,在Waymo数据集上的实验表明,OpenGS-SLAM将追踪误差降低至现有3DGS方法的9.8%,研究人员还在新视角合成任务上建立了一个新的基准,达到了最先进的结果。
3D Gaussian Splatting(3DGS)已成为SLAM领域的一种流行解决方案,因其能够生成高保真的新视角图像。
然而,现有的基于3DGS的方法主要针对室内场景,并依赖于RGB-D传感器或预训练的深度估计模型,因此在户外场景中的表现较差。
为了解决这一问题,研究人员提出了一种针对无界户外场景的纯RGB 3DGS SLAM方法OpenGS-SLAM。
从技术上来说,该方法先引入了一种Pointmap回归网络,用于在不同帧之间生成一致的Pointmap以进行位姿估计。
与常用的深度图相比,Pointmap能够包含跨多个视角的空间关系和场景几何信息,从而实现更鲁棒的相机位姿估计。
随后,将估计得到的相机位姿与3DGS渲染结合,构建端到端可微分优化管线,使得相机位姿与3DGS场景参数能够同时优化,显著提高了系统的跟踪精度。
此外,研究人员还为Pointmap回归网络设计了一种自适应尺度映射器(Adaptive Scale Mapper),能够更准确地将Pointmap映射到3DGS结构表示中。
在Waymo数据集上的实验结果表明,OpenGS-SLAM将跟踪误差降低至现有3DGS方法的9.8%,并在新视角合成(Novel View Synthesis, NVS)任务上达到了最新的SOTA结果。
如下图所示,在Waymo数据集的无界户外场景上,该方法能渲染高保真的新视角图片,准确捕捉车辆、街道和建筑物的细节。相比之下,MonoGS和GlORIE-SLAM存在渲染模糊和失真的问题。
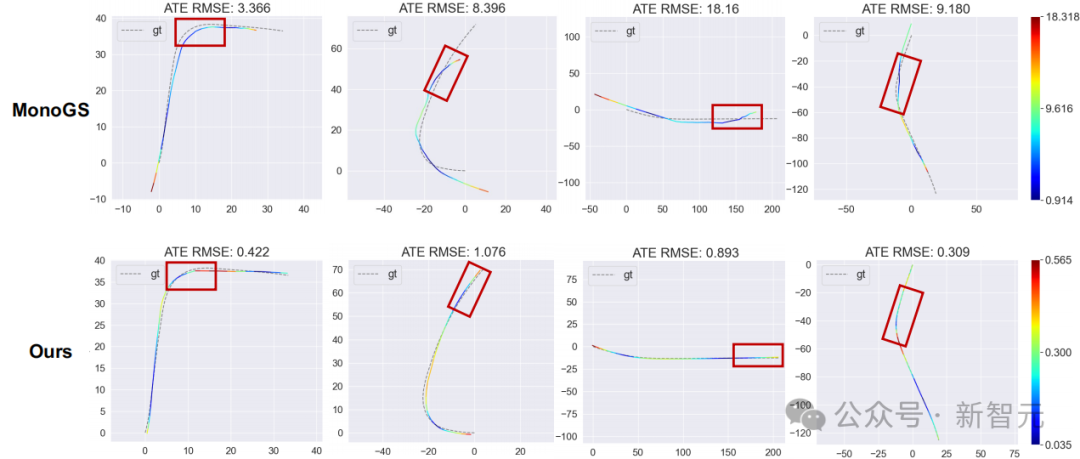
如下图所示,该方法拥有明显更优的追踪性能,在面临大转弯时也能稳定收敛。
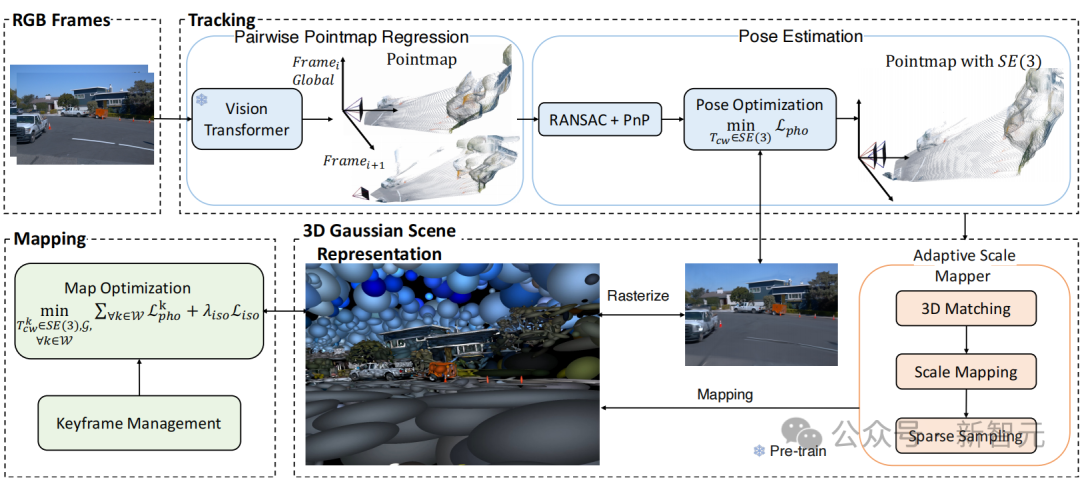
下图为SLAM方法的管线示意图,每一帧都会输入一张 RGB 图像用于追踪,当前帧和上一帧作为图片对输入到Pointmap回归网络进行位姿估计,随后基于当前的3D高斯地图进行位姿优化。
在关键帧处,系统执行地图更新,并通过自适应尺度映射器(Adaptive Scale Mapper)对 Pointmap 进行处理,以插入新的3D高斯点。
此外,相机位姿与3D高斯地图会在局部窗口内进行联合优化,确保更精准的追踪与场景重建。
帧间点图回归与位姿估计
之前基于3DGS和NeRF的SLAM工作,主要集中在室内和小规模场景中,其中相机的运动幅度较小,视角密集。
在这种情况下,NeRF或3DGS可以直接用于优化相机位姿。然而,户外场景通常涉及基于车辆的摄影,特征是运动幅度较大且视角相对稀疏,使得直接优化相机位姿难以收敛。
鉴于点图包含视角关系、2D到3D的对应关系和场景几何信息,研究人员提出了一种基于帧间点图回归网络的位姿估计方法,旨在实现稳健且快速的当前帧相机位姿估计。
研究人员利用一个预训练的点图回归网络,结合了ViT编码器、带有自注意力和交叉注意力层的Transformer解码器以及一个MLP回归头,生成连续帧图像的点图,两个图像分支之间的信息共享有助于点图的正确对齐。
尽管应用点图可能看起来有些反直觉,但它能够在图像空间中有效表示3D形状,并且允许在不同视角的射线之间进行三角测量,而不受深度估计质量的限制。
随后,使用稳健且广泛应用的RANSAC和PnP来推断两帧之间的相对姿态,使用这种方法,估计第k帧的位姿为
位姿优化
为了实现精确的相机位姿追踪,研究人员基于3DGS可微光栅化管道,构建一套可微的相机位姿优化方法,定义光度损失为:
其中rr表示每个像素的可微渲染函数,通过高斯GG和相机位姿TCWTCW生成图像,IˉIˉ表示真实图像。光度损失LphoLpho关于位姿TCWTCW的梯度为:
通过这些步骤,利用渲染函数的微分,将增量位姿更新与光度损失紧密关联。这一策略使得相机位姿能够基于 3DGS 渲染结果 进行端到端优化,从而确保高精度且稳定的位姿跟踪。
研究人员使用3DGS作为场景表示,提出自适应尺度映射器(Adaptive Scale Mapper),在关键帧时为地图插入新的高斯点。
利用先前获得的点图来映射3D高斯地图,由于帧间点图存在尺度不稳定的问题,基于点匹配关系计算连续帧之间的相对尺度变化因子,以确保整个场景的尺度一致性。
高斯地图优化
研究人员管理一个局部关键帧窗口W,以选择观察相同区域的非冗余关键帧,为后续的建图优化提供更高效的多视角约束。
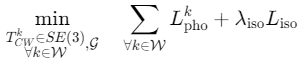
在每个关键帧上,通过联合优化W窗口中的高斯属性和相机位姿来实现局部BA,优化过程仍然通过最小化光度损失进行。
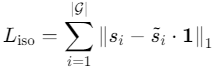
为了减少高斯椭球体的过度拉伸,采用了各向同性正则化:
自适应学习率调整
在经典的室内SLAM数据集中,相机通常围绕小范围场景运动并形成闭环,使高斯优化的学习率随迭代次数逐渐衰减。
然而,文中研究的户外数据由前向车辆相机捕获,所经过区域不会重访,因此需要不同的学习率衰减策略。
为此,研究人员提出了一种基于旋转角度的自适应学习率调整策略:当车辆沿直路行驶时,学习率逐步衰减;在遇到坡道或转弯时,动态提升学习率,以更有效地优化新场景。
首先,计算当前关键帧和上一关键帧之间的旋转矩阵R1和R0,其相对旋转矩阵为
接着将弧度θrad转换为度数θ,并根据以下公式调整累计迭代次数:
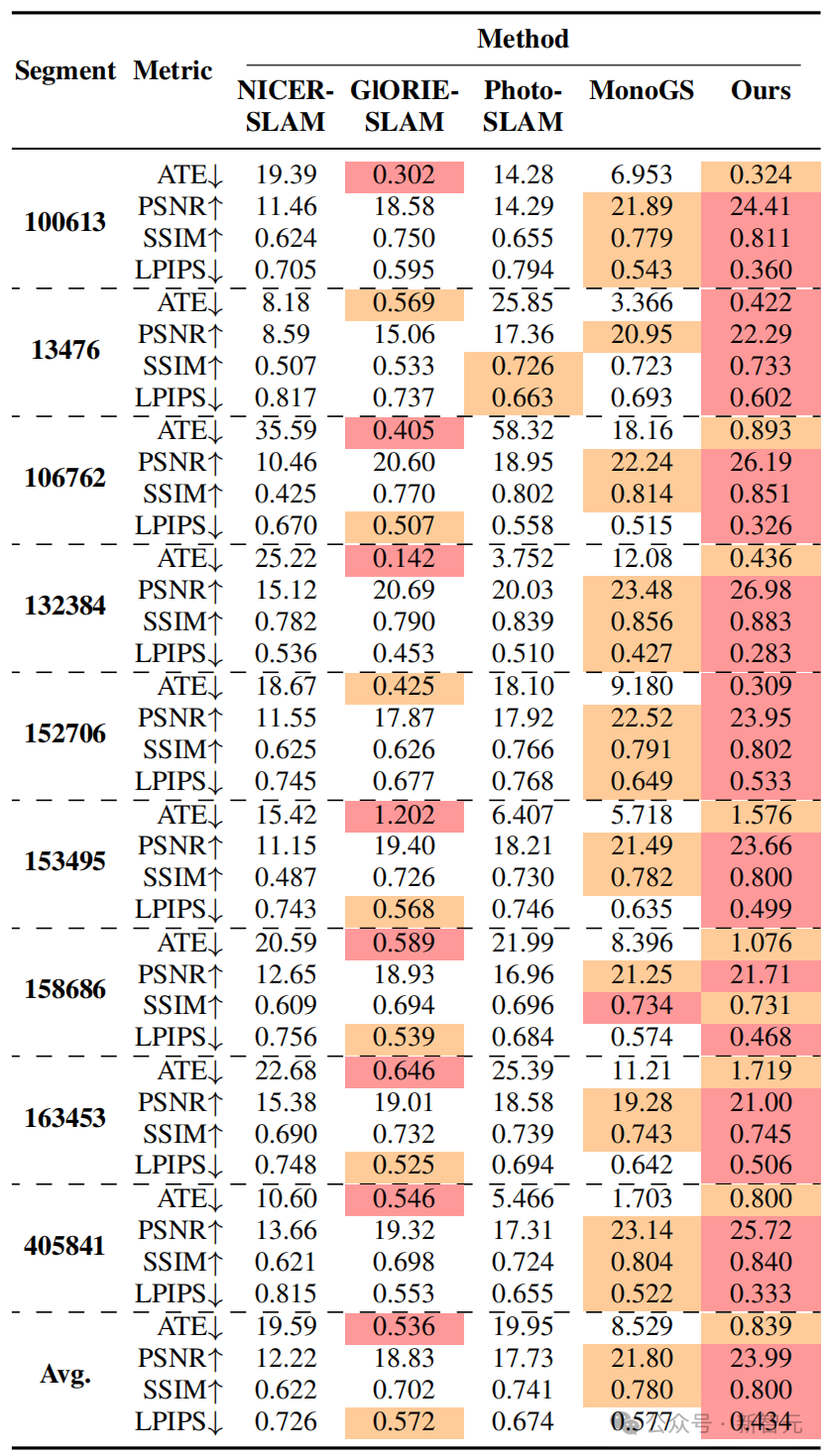
该方法在Waymo数据集上实现了新视角合成(NVS)的最佳性能。在追踪精度方面,与GlORIE-SLAM相当;而相比同样基于3DGS的SLAM方法MonoGS,误差降低至9.8%,显著提升了系统的鲁棒性和准确性。
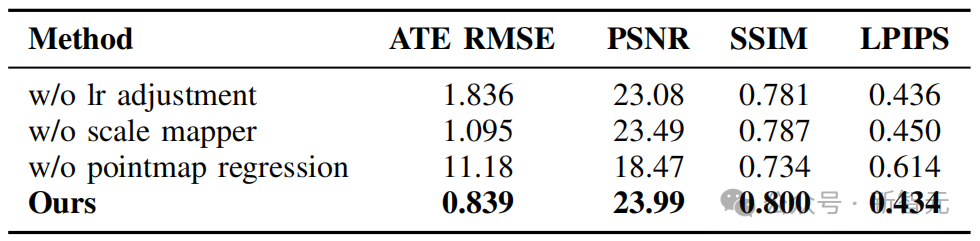
下表显示,自适应学习率调整和自适应尺度映射均对整体性能产生积极影响,而Pointmap回归网络更是该方法的核心支撑,对系统性能至关重要。
OpenGS-SLAM是一种基于3DGS表示的RGB-only SLAM系统,适用于无界的户外场景。该方法将点图回归网络与3DGS表示结合,确保精确的相机姿态跟踪和出色的新视图合成能力。
与其他基于3DGS的SLAM系统相比,该方法在户外环境中提供了更高的跟踪精度和鲁棒性,使其在实际应用中具有较高的实用性。
(文:新智元)