

在智能城市、智能电网、无人系统等前沿应用不断扩展的今天,多智能体系统(Multi-Agent Systems, MAS)作为新一代智能协同的技术基础,正迎来前所未有的发展机遇。
在这些系统中,多个具备计算与通信能力的智能体需要在没有中心协调、通信受限的条件下实现任务协作、资源共享与一致性决策。这一过程的核心挑战之一,便是分布式共识优化问题。
近年来,分布式共识优化逐渐成为机器学习、运筹优化、群体智能等多个交叉领域的研究热点,聚焦如何在仅依赖本地信息和邻居通信的前提下,实现全局目标的优化与智能体之间的解一致性。
在这一背景下,华南理工大学计算智能团队围绕“多智能体共识与合作中的分布式进化计算”这一核心问题,持续开展系统研究,已取得一系列具有代表性的成果。相关研究不仅理论扎实、方法创新,更在多个现实场景中展现出显著应用潜力。

分布式进化计算的系统性探索与算法创新
系统综述:构建 EC 与 MAS 融合研究的理论蓝图
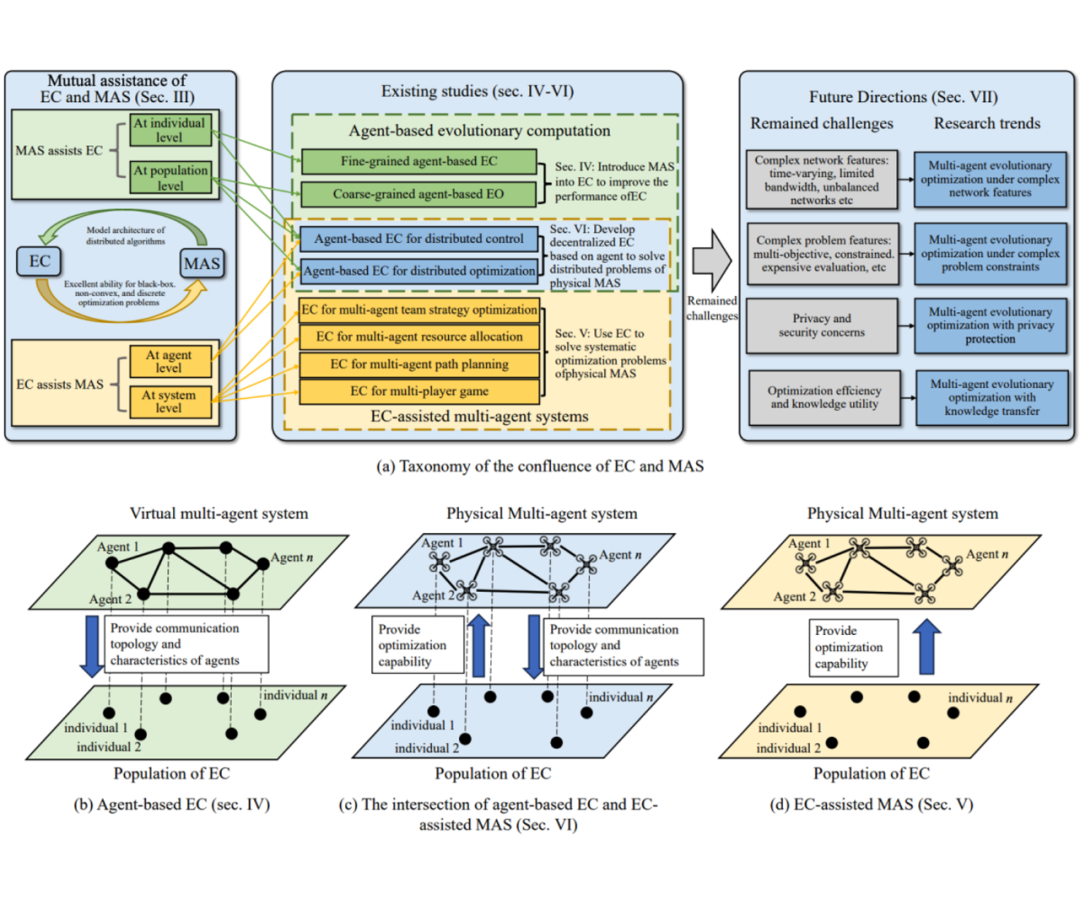
为梳理进化计算与多智能体系统交叉领域的发展脉络,团队在 IEEE / CAA Journal of Automatica Sinica 发表综述论文,系统总结了二者融合的主要研究方向与技术路径。
论文从两个维度出发:
-
基于 MAS 的 EC 建模:探索如何利用多智能体模型增强 EC 的分布式能力与并行计算性能;
-
EC 辅助 MAS 优化:利用 EC 强大的全局搜索能力,提升 MAS 在协同任务中的优化表现。
此外,团队还提出了一个描述性框架,总结现有研究成果,并展望了未来在联邦学习、边缘计算等新兴技术背景下的融合潜力。
期刊信息:
IEEE / CAA Journal of Automatica Sinica(综述), DOI: 10.1109/JAS.2025.125246
文章链接:
https://www.ieee-jas.net/article/doi/10.1109/JAS.2025.125246
多智能体粒子群优化算法 MASOIE:内外部学习机制助力协同优化
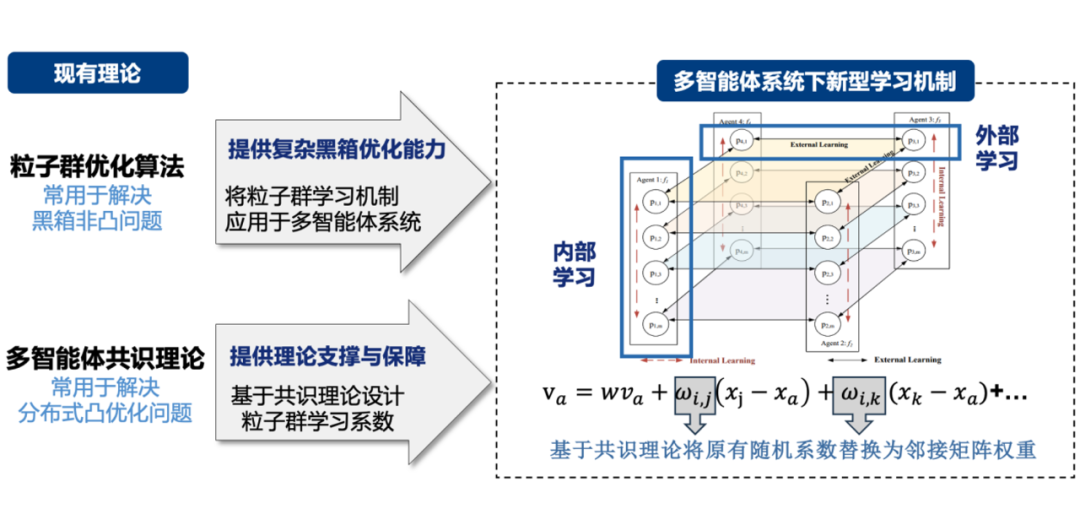
在分布式环境下,智能体之间的通信能力和信息共享受限,如何在这一限制下协同优化全局目标函数是重要挑战。
为此,团队提出 MASOIE(Multi-Agent Swarm Optimization With Adaptive Internal and External Learning)算法,创新性地引入了内部学习与外部学习机制,在保持系统一致性的同时提升整体优化性能。
-
内部学习:每个智能体根据自己的局部目标函数独立优化,聚焦局部最优。
-
外部学习:智能体通过与邻居的交流,实现经验共享与协同进化,从而逐步接近全局最优。
算法还引入外部学习惯性速度控制策略,在演化过程中自适应调整通信频率,提升了算法在收敛速度和通信效率上的平衡能力。
应用案例:在无线传感器网络的多目标协同定位中,MASOIE 实现了高精度与高一致性的目标识别,充分展示其实用价值。
期刊信息:
IEEE Transactions on Evolutionary Computation, DOI: 10.1109/TEVC.2024.3380436
文章链接:
https://ieeexplore.ieee.org/document/10477458
代码链接:
https://github.com/iamrice/Multi-Agent-Swarm-Optimization-with-Adaptive-Internal-and-External-Learning-in-TEVC-2024
目标激励驱动的协同演化算法 MACPO:让“自私”节点协同起来
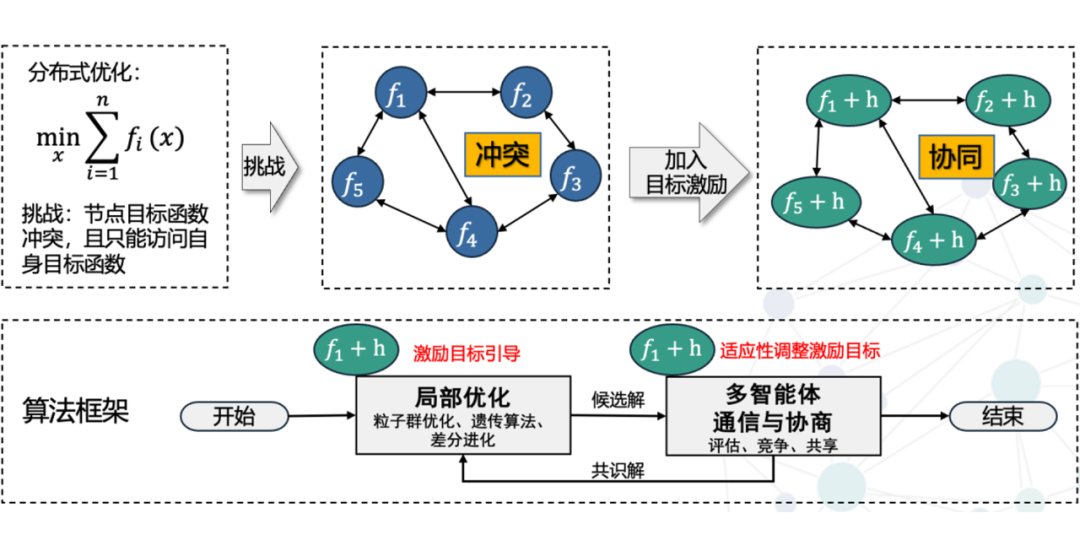
当系统中各个节点的局部目标函数存在矛盾时,如何实现合作优化?团队提出 MACPO(A Multiagent Co-Evolutionary Algorithm With Penalty-Based Objective)算法,核心思路是通过激励机制引导协作行为。
MACPO 在设计上将优化过程拆分为两个阶段:
-
局部优化阶段:引入惩罚目标函数,使每个节点即使在只知道本地信息的前提下,也能通过“奖励/惩罚”机制更理性地搜索。
-
协商阶段:节点之间根据共享变量是否存在冲突进行通信,并基于局部反馈动态调整目标方向,实现更合理的集体进化。
此外,算法设计了冲突检测机制与共享变量协商机制(评估-竞争-共享),提高了解的一致性与可控性。
实验显示,该方法在无梯度约束优化场景中能取得与集中式算法相当的效果,且适应分布式部署需求。
期刊信息:
IEEE Transactions on Systems, Man, and Cybernetics: Systems, DOI: 10.1109/TSMC.2024.3380389
文章链接:
https://ieeexplore.ieee.org/abstract/document/10500484
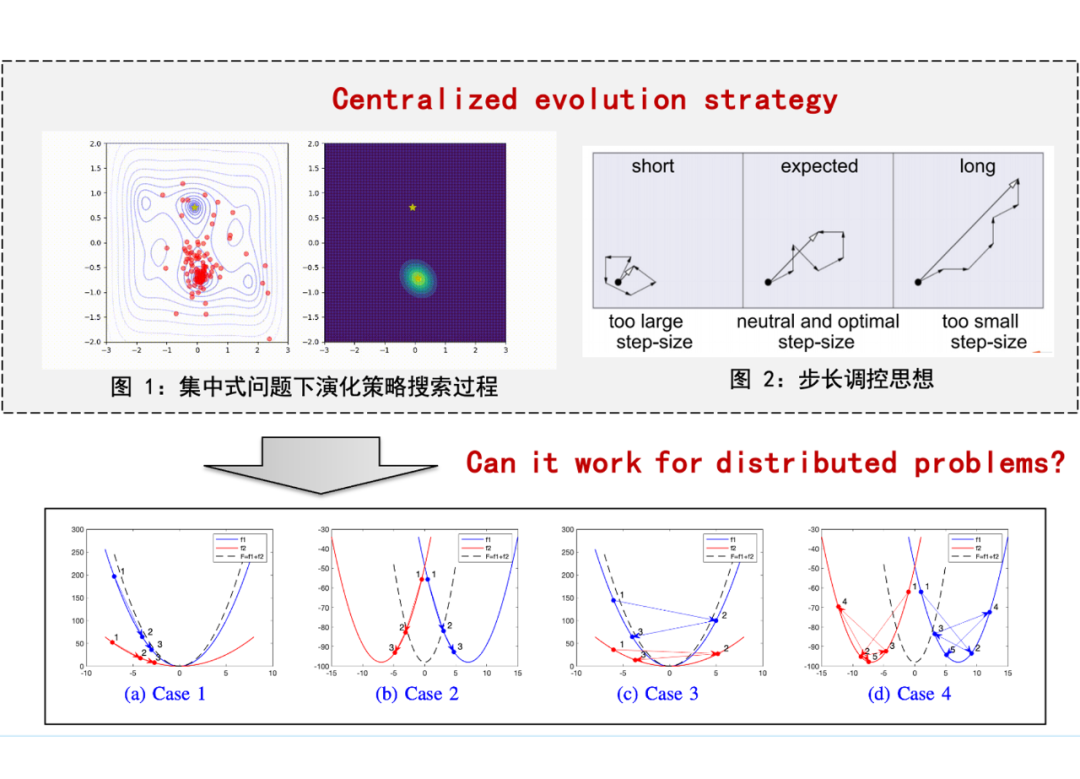
步长自适应机制 CCSA:动态调整节奏,提升黑盒优化性能
在黑盒共识优化中,如何选择合适的步长策略至关重要。传统方法大多使用固定或单调递减的步长,难以适应复杂任务。为此,团队设计了一种具有协作与累积特性的步长自适应机制(CCSA),构建了更灵活的搜索节奏调控方式。
-
当多个智能体的搜索方向一致时,放大步长,快速朝向最优区域收敛。
-
当搜索方向存在显著冲突时,缩小步长,以避免误差扩散和信息偏离。
实验结果表明,该算法在多个复杂函数测试中取得更优的收敛效果与系统一致性,展现出极强的黑盒优化能力。
期刊信息:
IEEE Transactions on Evolutionary Computation,DOI:10.1109/TEVC.2025.3525713
文章链接:
https://ieeexplore.ieee.org/document/10824905
MASTER 算法:提升传感器网络下多目标协同定位精度
面对无线传感器网络中常见的“无数据关联”问题,团队提出 MASTER 算法(Multi-Agent Swarm with contribution-based collaboration)。该方法将传感器间信息共享建模为双层优化问题,核心贡献包括:
-
利用 Kuhn-Munkres 算法与 CSO 方法实现本地优化;
-
设计“贡献学习机制”,根据传感器在全局目标中的贡献程度,进行加权式经验传播;
-
在多个定位维度与目标数量场景下,实现了更小的误差、更强的一致性。
期刊信息:
IEEE/CAA Journal of Automatica Sinica,DOI:10.1109/JAS.2025.125150
文章链接:
https://www.ieee-jas.net/en/article/doi/10.1109/JAS.2025.125150

分布式黑盒共识优化竞赛:构建统一研究基准平台
华南理工大学计算智能团队于 CEC2024 组织并主导了首届分布式黑盒共识优化竞赛,为分布式共识优化领域构建了具有挑战性与实际导向的测试平台。竞赛模拟多智能体在不同通信拓扑、目标函数异质性、冲突环境下的协同场景,吸引了众多研究团队参与,推动了算法性能与工程适配的共同进步。
竞赛信息与测试平台:
https://github.com/iamrice/Proposal-for-Competition-on-Black-box-Consensus-based-Distributed-Optimization

未来展望:从智能协同到智慧生态系统
分布式共识优化不仅是算法问题,更是智能系统协作能力的“中枢神经”。随着 IoT、自动驾驶、智能制造的深入发展,去中心、可扩展、高鲁棒的优化机制将成为智能基础设施的刚需。未来,该领域有望向以下方向持续拓展:
-
🌐 与联邦学习、图神经网络等架构深度融合;
-
🔐 面向隐私保护和不可见目标函数的优化;
-
⚙️ 在工业控制、能源系统、复杂机器人编队等场景中广泛部署。
华南理工大学计算智能团队将持续围绕“分布式智能优化”的核心命题,推进基础研究与应用落地的双轮驱动,欢迎来自不同领域的同行共同探讨与合作!
📬 合作与交流请联系:
-
陈伟能 教授(通讯作者):cschenwn@scut.edu.cn
-
陈泰佑 博士:575583114@qq.com
(文:PaperWeekly)