
科学家一直在努力揭开动物行为背后的奥秘,但现实世界中的实验往往受到很多限制。比如很难同时精确还原动物的身体、神经系统以及它们与环境的互动。现在,得益于新一代计算模拟技术,研究人员能用虚拟的 “数字生物” 来探索这些复杂问题。DeepMind 最新推出的果蝇全身物理仿真项目(Whole-body physics simulation of fruit fly locomotion),或许就是这样一个前沿例子。
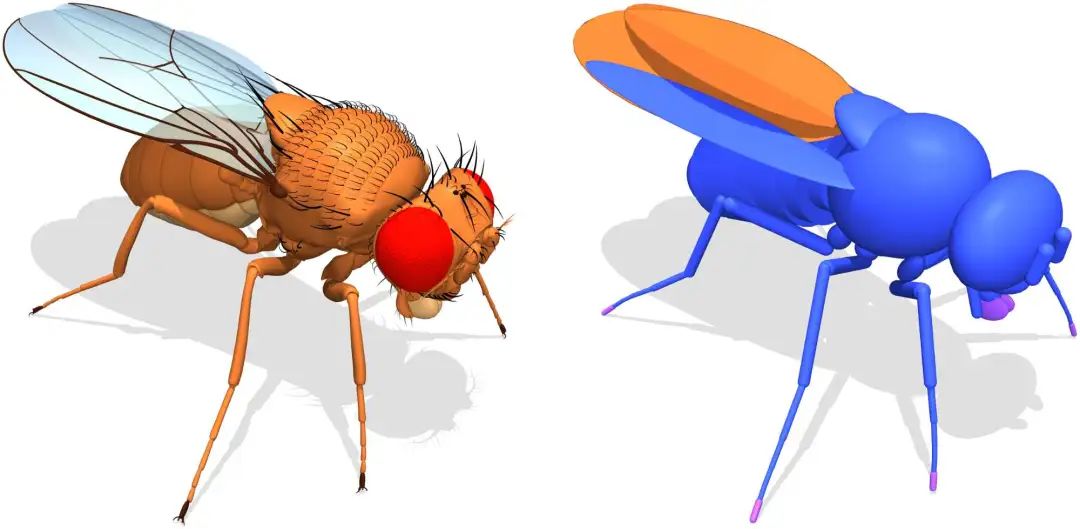
项目团队选择了 MuJoCo 这款开源物理引擎作为基础,它最初是为机器人和生物力学研究设计的。为了让虚拟果蝇能像真实果蝇一样在空中飞行、在墙壁上行走,科学家们对 MuJoCo 进行了定制升级。他们加入了能够模拟翅膀拍动时空气阻力的功能,还设计了模仿昆虫足部吸附力的 “黏附装置”。这些细节让模拟出来的果蝇不再只是模型,而是能真实 “动起来” 的数字生命。
更有趣的是,研究团队并不是简单地编程让果蝇做动作,而是让人工神经网络 “看” 大量真实果蝇的视频,从中学习如何自然地飞行和移动。经过训练,这个神经网络就像果蝇的大脑一样,能指挥虚拟果蝇沿着复杂的路线飞行,甚至能根据视觉信息灵活调整自己的动作。比如,你会看到一只虚拟果蝇按照一串蓝色小点一路飞行,和现实世界里的果蝇几乎没有区别。
为什么要做这样复杂的虚拟生物模型?原因很简单,它们能帮助科学家理解,动物的身体、神经系统和周围环境是如何共同塑造行为的。许多难以在实验室里直接观测的细节,通过虚拟果蝇的“身体”就能被清楚地追踪和分析。
更令人期待的是,这种方法并不只适用于果蝇。DeepMind 的团队已经用类似技术模拟了老鼠,下一步还将挑战斑马鱼,一种经常用在生物学研究中的小鱼,它有很多基因和人类相似。通过这样高度还原的虚拟生物,科学家们有机会对动物的行为机制进行前所未有的探索。
总的来看,这项研究不仅让我们能够在电脑中观察到栩栩如生的果蝇,还为理解生命、推动神经科学和行为学的发展打开了新大门。有了这些虚拟实验伙伴,未来的科学发现或许会更快到来,也会更加细致入微。
参考文献:
[1] https://github.com/TuragaLab/flybody
[2] https://github.com/google-deepmind/dm_control/tree/main?tab=readme-ov-file#rendering
知识星球服务内容:Dify源码剖析及答疑,Dify对话系统源码,NLP电子书籍报告下载,公众号所有付费资料。加微信buxingtianxia21进NLP工程化资料群。
(文:NLP工程化)