

一、活动背景与主题
2024 年 4 月 10 日,由 PNP机器人联合机器人大讲堂、Franka Robotics主办的“具身智能:Franka Robotics 的历史、机遇与未来”线上研讨会在机器人大讲堂平台成功举办。本次研讨会聚焦具身智能领域的前沿技术与应用场景,邀请 Franka Robotics 联合创始人 Dmitrij Forssilow 博士与 PNP Robotics 创始人兼 CEO 包文涛共同担任主讲嘉宾,吸引来自学术界、工业界及投资界的上千名专业人士参与。会议由包文涛主持,旨在探讨机器人技术的未来发展方向。

具身智能作为人工智能与机器人技术深度融合的前沿领域,近年来受到广泛关注。它强调机器人通过与环境的物理交互来学习和理解世界,从而实现更加自然、灵活的智能行为。在这一背景下,Franka Robotics 作为具身智能领域的先行者,凭借其在机器人控制技术方面的创新成果,为行业发展树立了标杆。PNP Robotics 作为思灵机器人以及旗下Franka机器人重要合作伙伴,致力于将 Franka 的先进技术与中国市场的实际需求相结合,推动具身智能技术在本地的落地应用。本次研讨会不仅为与会者提供了一个深入了解具身智能技术的机会,也为学术界、工业界和投资界搭建了一个交流合作的平台,促进了各方在具身智能领域的协同创新。
二、活动内容与技术亮点
(一)
Franka Robotics 的技术架构与创新优势

Dmitrij Forssilow 博士详细阐述了 Franka Robotics 在具身智能领域的技术积累与创新成果。其核心技术为关节级力控技术(Joint-level Force Control),通过高精度力传感器与动态反馈算法,实现机器人与环境交互的实时力控制,显著提升操作精度与安全性。关节级力控技术基于高精度的六轴力 / 力矩传感器,安装在机器人的每个关节处,能够实时感知机器人与环境之间的接触力。结合先进的控制算法,如阻抗控制和导纳控制,机器人可以像人类一样,根据接触力的大小和方向,灵活调整自身的运动和姿态,从而在复杂的物理交互场景中实现高精度的操作。
他指出,Franka 机器人采用七自由度(7-DoF)冗余设计,在运动学模型中引入额外自由度,使机器人在复杂环境中的轨迹规划与碰撞规避能力达到类人水平。七自由度设计意味着机器人具有超过完成任务所需的最小关节数量,这为机器人提供了更多的运动灵活性和冗余度。例如,在狭窄空间内进行操作时,机器人可以通过调整冗余关节的姿势,轻松避开障碍物,同时保持末端执行器的稳定性和精确性。此外,这种冗余设计还使得机器人能够更好地适应不同的任务需求和环境变化,提高了机器人的通用性和适应性。
此外,Franka 机器人全面兼容 ROS2、Isaac Sim 及 MoveIt 等主流机器人中间件,构建了开放的生态系统,加速了机器人技术的学术研究与工业应用迭代。ROS2 作为机器人操作系统,为机器人提供了丰富的软件工具和库,支持多机器人协同、实时控制等功能。Isaac Sim 是一个基于物理引擎的仿真平台,能够高精度地模拟机器人的运动学和动力学行为,为算法开发和测试提供了高效的虚拟环境。MoveIt 则专注于机器人的运动规划和控制,结合这些中间件,研究人员可以快速开发、测试和部署机器人应用,大大提高了研发效率。
Dmitrij 博士进一步展示了 Franka 机器人的全球应用案例。丰田研究所基于 Franka 平台开展的大规模模仿学习项目,通过强化学习算法优化机器人控制策略。在该项目中,研究人员利用 Franka 机器人的高精度力控和灵活的运动能力,让机器人模仿人类专家的操作示范,学习复杂的装配和操作任务。通过对大量数据的分析和学习,机器人能够逐渐掌握任务的关键技巧,提高操作的成功率和效率。Google DeepMind 利用 Franka 机器人训练 Gemini Robotics 多模态模型,验证其在具身场景中的泛化能力。在训练过程中,Franka 机器人通过与各种物体和环境的交互,为模型提供了丰富的视觉、触觉和运动数据,帮助模型更好地理解和适应不同的物理场景,从而提高了模型的泛化能力和鲁棒性。斯坦福大学基于 Franka 平台开发的 DROID 系统,成为 AI 视觉与运动融合领域的基准测试平台。
(二)PNP Robotics 的本地化技术创新

包文涛详细阐释了PNP Robotics基于Franka机器人开发的先进遥操作方案。该方案融合了高精度的力反馈与位置反馈技术,构建了闭环控制系统,实现了对机器人动作的精确控制。在远程医疗手术中,医生借助该技术可远程操控机器人进行精细手术,力反馈功能实时传递手术器械与人体组织的接触力,提升手术精准度与安全性;在工业装配场景下,操作人员能精准控制机器人完成复杂零部件装配,位置反馈确保装配精度;在危险环境作业中,如核辐射区域或深海探测,该技术使操作人员远离危险,同时保证任务高效执行。
包文涛还深入介绍了PNP Robotics开发的基于空间位置捕捉的运动学映射解决方案。通过高精度的动作捕捉设备,实时获取操作者手部的三维位置和姿态信息,再经由运动学算法映射到机器人关节空间,实现自然流畅的人机交互。该方案大幅降低了科研机构的开发门槛,无需复杂编程即可实现复杂操作,加速了机器人技术在医疗、工业等实际场景中的应用迭代。
PNP Robotics开发的双臂机器人数据采集方案,具备卓越的适应性安装功能,通过模块化设计与灵活的配置选项,使机器人能够快速适应不同工作环境。在狭小空间操作任务中,如飞机发动机内部检修,双臂机器人可灵活展开作业;在模块化装配任务中,双臂协同作业提高装配效率与精度,为工业自动化提供了创新解决方案。
包文涛还提到,PNP Robotics正在积极探索基于Franka机器人的多模态数据融合技术。通过整合视觉、触觉与力感知数据,构建多维度环境认知模型。在智能制造领域,该技术使机器人在复杂生产环境中高效完成质量检测、精密装配等任务;在AI研究领域,为训练更强大的AI模型提供丰富的多模态数据,推动机器人技术向更高层次发展。
(三)深度对话:技术趋势与未来展望
在技术研讨环节,Dmitrij 博士阐述了 Franka Robotics 的未来发展方向及技术优势。未来,Franka 将优化 ROS2 中间件的实时性和可靠性,从通信协议、资源管理、任务调度等方面提升数据传输效率和稳定性,确保机器人系统在复杂网络环境下的实时响应和稳定运行。同时,Franka 将开发具备移动能力的具身平台,拓展机器人在大型仓储物流、工业巡检、服务机器人等动态环境中的应用场景,使机器人能自由移动并完成各种动态任务。
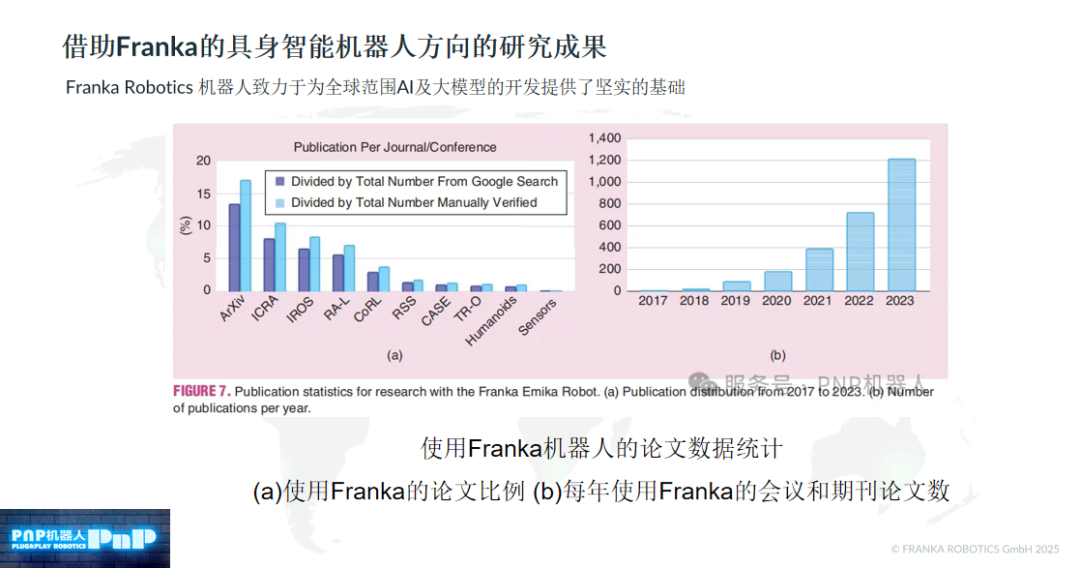
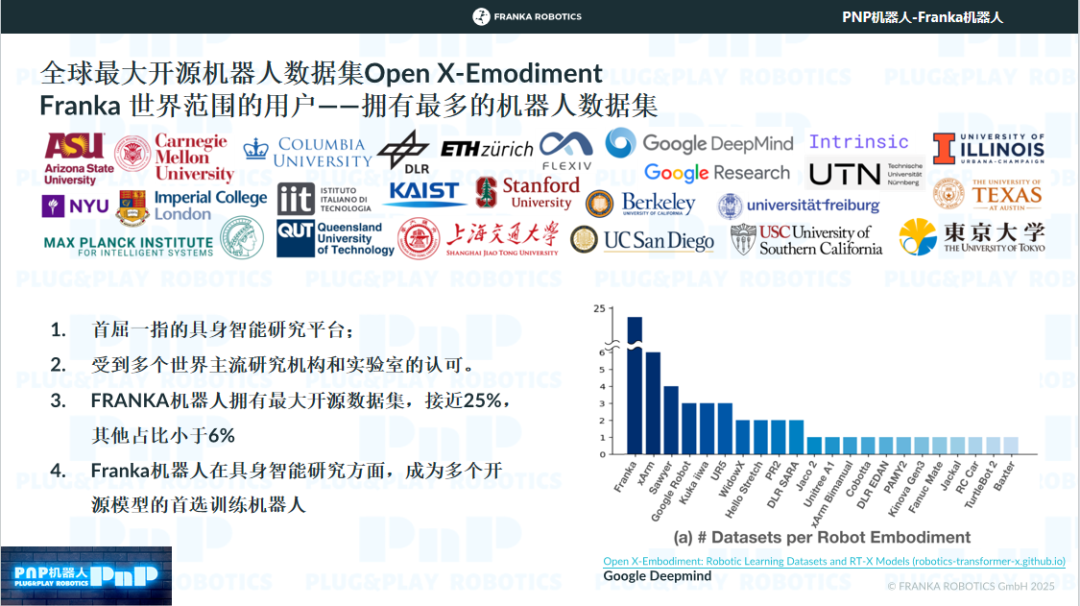
Dmitrij 博士强调,关节级力控技术是实现机器人本体感知的关键,通过精确控制每个关节的力和力矩,使机器人能实时感知和适应与环境的物理交互,显著提升其在非结构化环境(如家庭、建筑工地、灾难现场等)中的适应性和实用性。与其它协作机器人相比,Franka 在力控精度(小于0.1N)、控制带宽(1kHz)及生态适配性方面具有显著优势,使其成为学术研究与工业验证的首选平台。其高精度运动学模型与可重复性操作能力,使其成为 Open X-Embodiment 等机器人基准数据集的构建核心,推动了机器人视觉与运动规划领域的研究进展。

此外,Franka 平台通过标准化 API 接口与通用数据格式,为 AI 模型的迁移学习与强化学习提供了理想环境,方便研究人员快速迁移和优化 AI 模型。在双臂协同操作方面,PRINLAB 团队基于 Franka 平台开发的基于力觉反馈的双臂协同装配算法,结合模型预测控制(MPC)优化轨迹规划,显著提升了复杂装配任务的执行效率和质量,为双臂协同操作领域提供了重要技术支持。
三、活动总结与行业展望
本次研讨会成功搭建了学术、产业与资本的跨界交流平台,系统呈现了具身智能领域的技术演进路径与应用潜力。Franka Robotics 凭借其在力控技术与生态系统整合方面的领先优势,确立了在具身智能学术研究与操作策略验证领域的标杆地位;PNP机器人作为思灵机器人以及Franka机器人中国区域主要合作方,则通过本地化技术创新,推动了具身智能技术在中国市场的场景化落地。未来,双方将通过技术协同与生态共建,进一步拓展具身智能在智能制造、医疗健康及服务机器人等领域的应用边界,为机器人技术的产业化发展注入新动能。
随着技术发展,具身智能将在各领域广泛应用,成为推动机器人产业发展的重要力量,引领技术升级,创造更智能、便捷的生活和工作环境,同时为科研、企业和投资机构带来巨大机遇,吸引资源和人才投入,加速创新与发展。
关于集智联机器/PNP机器人
集智联机器人(Plug & Play Robotics),简称PNP机器人,是Franka Robotics和思灵机器人金牌合作伙伴,集智联机器人团队成员均来自于ABB、Uninversal Robots(优傲机器人)等国内外机器人行业知名企业,学术背景来自于哈尔滨工业大学、多伦多大学、滑铁卢大学等,具有较强的学术背景。PNP机器人致力于为客户提供从硬件到软件的全方位支持,帮助客户快速实现机器人的部署与应用,提升生产效率和智能化水平。
PNP机器人是思灵机器人以及旗下Franka机器人中国区域金牌合作方,聚焦面向生活和工业场景的单臂/双臂数据采集场景,致力于机器人即插即用(Plug & Play)技术和具身智能通用解决方案。
www.pnprobotics.com (PNP机器人官方网站)
注更多具身智能方案,请及时联系PNP机器人。

关注具身智能的未来,让我们共同见证
Franka机器人在科研创新中的重要突破!
(文:机器人大讲堂)