
还原一个魔方需要多久?从Lucas Etter创造的4.904秒世界纪录,到中国玩家杜宇生的3.47秒,再到美国选手Max Park的3.13秒,人类在速解魔方领域不断突破极限。
与此同时,机器人领域的研究者也在这条赛道上持续探索。近日,一支由普渡大学电子与计算机工程学生组成的团队,远超三菱原纪录三倍的惊人成绩,成功拿下吉尼斯“最快解魔方机器人”头衔。
当普渡大学的Purdubik魔方机器人在吉尼斯认证官的见证下,以103毫秒这个时间比人类眨眼还要短暂的成绩刷新世界纪录时,现场观众甚至没来得及看清它的动作。这场破纪录表演的背后,是十余年来全球工程师们在机器人控制、算法优化和机械设计领域的持续竞速。
▍秒级到毫秒级:魔方机器人的进化之路与技术跃迁
魔方机器人技术的发展经历了三个明显的技术代际跃迁,从早期利用乐高积木搭建的简易装置,到如今由工业级伺服电机驱动的专业机器人,解魔方这一娱乐性挑战,已成为检验机器人技术进步的重要试验场。
第一代魔方机器人以2010年诞生的乐高CubeStormer为代表。该机器人由RM公司首席工程师Gilday和安全系统工程师麦克道布森共同设计,经过3次迭代。初代CubeStormer1能在12秒左右复原任意3阶魔方;2011年秋,第二代CubeStormer2推出的并将魔方复原时间缩短至10秒内,达到5.35秒;2015年,第三代CubeStormer3再次刷新纪录,将魔方复原时间压缩到3.254秒。CubeStormer采用三星GalaxyS4智能手机作为视觉处理器,通过蓝牙连接乐高NXT控制器驱动机械结构。这种架构虽显简陋,但开创性地证明了ARM处理器具备实时处理魔方图像的能力,低成本舵机可完成基本转动,开源算法能够实现可靠求解。
第二代魔方机器人以Sub1 Reloaded为标志。该机器人由德国英飞凌公司工程师Albert Beer于2016年研制,其突破性在于采用FPGA进行实时图像处理,多摄像头并行采集系统将图像处理时间从CubeStormer的1.2秒缩短到80毫秒,同时开始使用谐波减速电机,将单次转动时间控制在50毫秒以内,这为突破1秒大关奠定了基础。2017年在德国慕尼黑电子展上,它耗时仅0.637秒便复原三阶魔方,打破此前0.887秒的吉尼斯世界纪录。
第三代魔方机器人代表则包括三菱TOKUFASTbot和MITCubot。MIT Cubot 由麻省理工学院学生BenKatz和JaredDiCarlo研发,通过定制电子设备和计算机视觉系统,在测试中以 0.38 秒完成复原,较 Sub1 提升 40%。
三菱 TOKUFASTbot 则由日本三菱电机于2020年研制,该机器人采用了三菱电机自主研发的紧凑型高功率伺服电机、可编程控制器和 AI 颜色识别算法,配合预测性扭矩控制技术,将电机单次转动时间压缩至 15 毫秒。凭借高速高精度 FA 设备和控制技术,TOKUFASTbot实现了0.009秒内完成90度的旋转,并于 2024 年以 0.305 秒的成绩刷新吉尼斯纪录。
▍
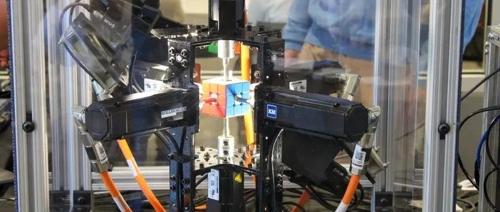
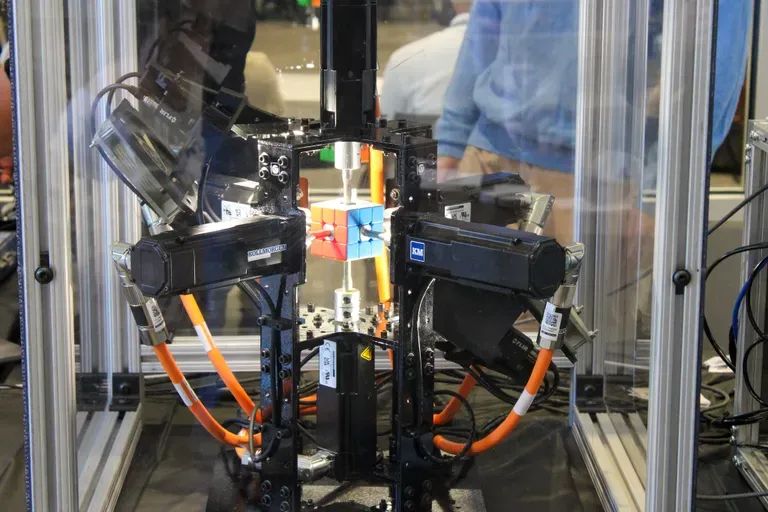
Purdubik魔方作为第四代魔方机器人的代表,在三个关键技术领域实现突破。
机械设计方面,团队采用科尔摩根 AKM 系列伺服电机与精密行星减速器,创新设计的 “双动子” 结构通过磁性联轴器实现双电机协同工作,在保证扭矩输出的同时,实现 0.5 毫秒的响应速度,其 150,000 rad/s² 的角加速度峰值达到前代纪录保持者的三倍。
控制系统方面,团队开发的“时空耦合优化算法” 改变传统运动规划模式。通过李雅普诺夫函数将时间最优和路径最优进行统一建模,使机械臂在操作过程中能够实时调整 20 个关节的扭矩分配,降低 37% 的能量损耗。
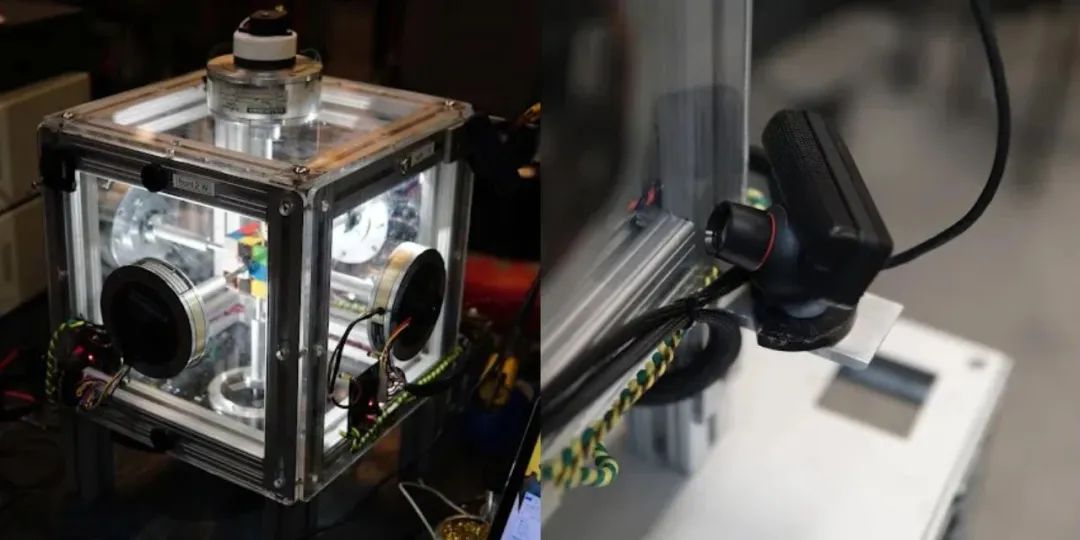
视觉系统方面,团队更是进行了突破性创新,采用了事件相机进行连续异步采样,该传感器仅在像素亮度变化时触发,将信号延迟从常规相机的 5 毫秒降至 50 微秒。结合 “流式求解器”,机器人可在识别首个色块时即启动运算,实现了真正意义上的实时处理。
据了解,Purdubik魔方由普渡大学学生团队在控制、优化和网络研究所(ICON)的支持下开发。该机器人于2024年12月在SPARK学生设计大赛中首次登场,并一举斩获第一名的佳绩。在比赛结束后,团队并未停止探索的脚步,而是持续对系统性能进行优化,不断挑战现代自动化和高速计算的极限,最终实现了近期的重大突破。目前,团队正全力以赴,致力于将Purdubik魔方的运行速度提升至100毫秒以下。

除了追求速度上的突破,团队还计划为Purdubik魔方增添更具互动性的体验。他们打算采用支持蓝牙的“智能魔方”,使用户能够实时打乱魔方,而机器人则会精准模仿用户的每个动作。一旦魔方被打乱完毕,机器人便能立即着手解开魔方。这种互动模式不仅增添了趣味性,还能让更多人直观地领略到机器人解魔方的奇妙。
▍迈向全新维度:魔方机器人速度超越竞赛的未来
魔方机器人的不断涌现和发展,绝不仅仅是速度和性能的竞赛,更是机器人技术在多个领域的深度探索和创新应用。从视觉识别到算法优化,从机械设计到运动控制,每一个环节都凝聚着研发人员的智慧和心血。
而随着物理极限的逐步逼近,魔方机器人竞赛正迈向全新的维度。普渡团队正在研发的多模态系统便极具代表性:借助集成触觉传感器与惯性测量单元,机器人得以感知魔方的摩擦力及惯量变化,进而自主调整控制参数;其“观察 – 模仿”模式能够实时学习人类玩家的解法策略。
这一技术路径表明,魔方机器人未来的竞争焦点将从单纯的执行速度,朝着更为复杂的智能交互能力方向转变。正如魔方之父鲁比克所说,当机器人开始展现出类人的问题解决思维时,这场持续二十年的技术竞赛才真正触及到其深层意义——并非单纯追求创造更快的机器,而是借助这个色彩斑斓的立方体,持续探索智能与机械融合的无限可能。
对于机器人行业爱好者、从业人士以及机器人专业高校师生而言,Purdubik魔方的出现无疑是一次极具意义的突破。它为机器人的速度和协调性研究提供了新的思路与方向,也让我们看到了未来机器人在更多领域应用的可能性。无论是在工业生产中的精密操作,还是在娱乐、教育等领域的创新应用,Purdubik魔方所展现的技术均具有重要的借鉴价值。
在未来,随着技术的不断进步,我们有理由相信,像Purdubik魔方这样的创新机器人会越来越多,它们将不断刷新我们对机器人能力的认知,为我们的生活带来更多的惊喜和改变。让我们一起期待Purdubik魔方团队在未来取得更好的成绩,也期待整个机器人行业迎来更多的创新与突破!
(文:机器人大讲堂)