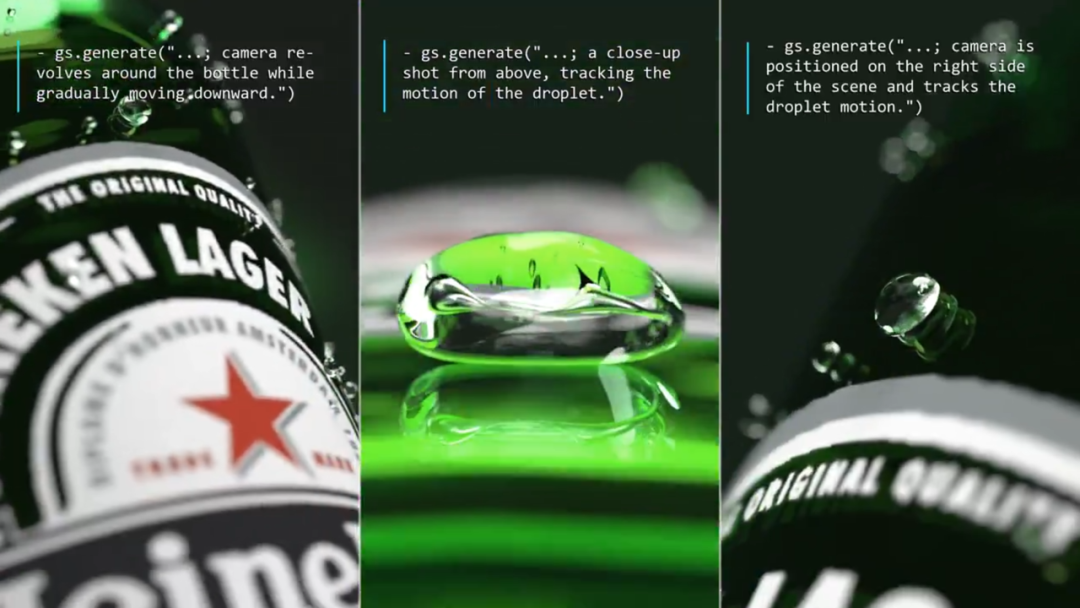
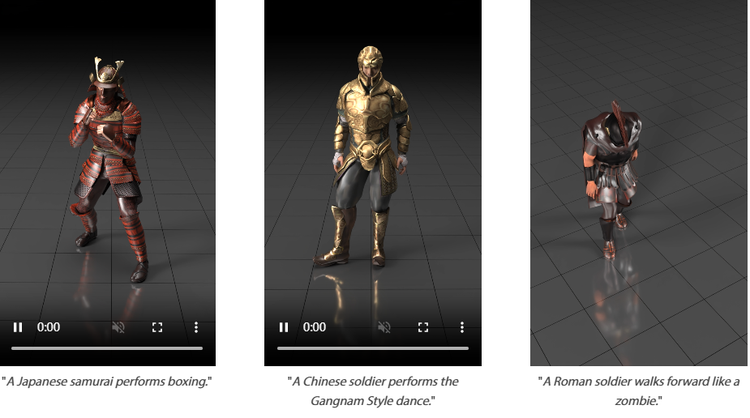
Genesis团队的目标是构建一个通用数据引擎,利用上层生成框架自主创建物理世界,并伴随多种数据模式,包括环境、摄像机运动、机器人任务提案、奖励函数、机器人策略、角色动作、完全交互的 3D 场景、开放世界的关节资产等,旨在实现机器人、物理 AI 及其他应用的完全自动化数据生成。显然,它并不是一个世界模拟器/Sora。Genesis是物理引擎和生成式AI的混合体,主要的作用是为通用机器人学习的提供了一个统一的模拟平台,通过降低物理模拟的门槛,虚拟再现现实世界,从而减少人类在数据生成中的投入,实现机器人及相关领域中自动化和自给自足的数据生态系统。机器人的数据收集一直是一个棘手的问题,一种方法是通过手动操作机器人来采集数据,因为是在真实物理世界中与机器人互动,可以确切知道机器人的位置、如何与世界互动,以及任务是如何成功或失败的。然而现实世界的数据采集成本高、效率低、难以扩展,并且存在各种局限性 (数据模态不完整、难以收集闭环数据等)。Genesis的解决方式是利用物理模拟和生成式AI技术,自主生成大量多样化的训练数据,无需依赖昂贵的真机数据采集,从而降低数据获取的门槛。此外,许多仿真环境在物理特性和渲染效果方面与现实世界存在差距,导致训练出的机器人难以在现实世界中应用,形成“Sim2Real Gap”。Genesis的解决方式是提供一个能够模拟各种材料和物理现象的通用物理引擎,并采用真实感渲染系统,尽可能使仿真环境逼近真实世界,支持基于物理原理的触觉传感器模拟。类似英伟达的Isaac Sim或Isaac Gym等项目通过仿真技术,加速了机器人领域的发展。从展示的demo来看,Genesis支持自然语言描述生成相应的场景,利用生成式AI技术生成传感器数据和策略,渲染物理属性的仿真也做得很到位,这对于解决具身数据稀缺,具有非常重要的意义。关于机器人行业的仿真问题,地瓜机器人云平台副总裁秦玉森向硅星人表达了他的看法:以阿波罗登月计划为例,即便我们拥有当年的所有数据资产,在今天也难以完全复刻这一壮举。这不仅仅是因为许多原始电子元器件已经停产,更重要的是,仅仅依靠更强大的算力和更多的数据并不能解决根本问题。虽然现代智能手机的运算能力已经远超当年的超级计算机,但在载人登月这样的复杂工程面前,我们依然面临重重挑战。“因为化简为繁易,化繁为简难,缺少能在数学和工程上优雅的做到化简,仿真只是徒增计算量。” “仿真仿的足够真,是需要算力和各种资源的,对于机器人来说,那为何不直接在现实世界中不断搭建呢?”因此,他认为Genesis作为引擎的价值在于可以让仿真的工程在“工程架构”相对优雅,化繁为简的把调用引擎需要理解的各种物理属性,变为能通过自然语言进行引擎搭建。他表示,Genesis的本质是证明了某条路可行,但距离真正的创造实际价值,还需要很多下游的产业人员配合。“比如当年英伟达Issac SIM应该是2018年发布的,至今6年了,业界有人使用,但是还是在易用度上有些许问题。”Genesis的团队的Chuang Gan则在X上表示,“我认识到许多机器人学家对此方法持怀疑态度,指出设置模拟器和解决模拟与现实差距的困难。他们主张仅专注于从现实世界数据中学习。我理解这些担忧,但我坚信我们不能仅仅因为创建一个好的物理模拟器具有挑战性就绕过物理模拟器!”他说,“请加入Genesis社区!我们希望说服机器人界‘Generative Physics Simulator is all You Need!’”Genesis或许还并不能做到“创世记”,但AI离真实的物理世界的确是越来越近了。