
人形机器人大模型企业「智在无界」完成数千万元融资
北京智在无界科技有限公司宣布完成数千万元融资,用于加强核心技术研发投入和加速模型迭代与产业化验证。公司专注于人形机器人的通用大模型研发,已开发出具身多模态大语言模型、多模态姿态模型及Retriever-Actor-Critic框架等技术。
北京智在无界科技有限公司宣布完成数千万元融资,用于加强核心技术研发投入和加速模型迭代与产业化验证。公司专注于人形机器人的通用大模型研发,已开发出具身多模态大语言模型、多模态姿态模型及Retriever-Actor-Critic框架等技术。
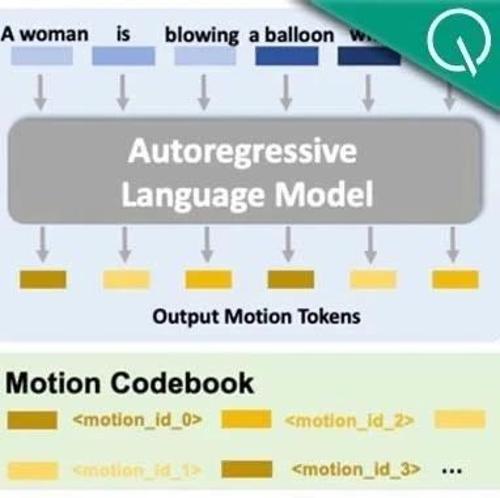
北大卢宗青团队在通用人形机器人动作生成领域取得突破,提出Being-M0框架和MotionLib数据集,实现了大规模且多样化的复杂人类动作生成,并验证了大数据+大模型的可行性。