宇树机器人成赛博科比!英伟达CMU新研究,投篮模仿篮球巨星,代码论文全开源

英伟达、卡内基梅隆大学团队通过ASAP方法解决了机器人敏捷动作训练难题,实现了宇树人形机器人的高难度动作表现。该框架分为预训练运动跟踪策略和差异动作模型两阶段,显著提高了机器人的灵活性和全身协调性。
英伟达、卡内基梅隆大学团队通过ASAP方法解决了机器人敏捷动作训练难题,实现了宇树人形机器人的高难度动作表现。该框架分为预训练运动跟踪策略和差异动作模型两阶段,显著提高了机器人的灵活性和全身协调性。
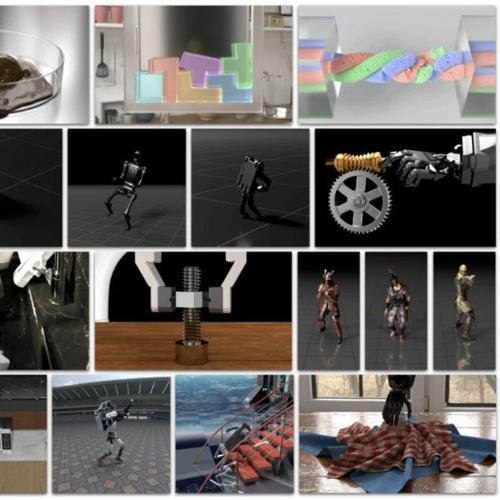
近日,卡内基梅隆大学等团队发布Genesis开源计算机模拟系统,提供机器人仿真训练环境。该系统比现实世界快43万倍,可在几小时内完成数十载的训练任务。通过输入自然语言命令即可创建复杂的仿真环境,无需手工编程。目前可应用于机械臂、足式机器人等多种形态产品的训练,支持跨平台硬件。

Genesis 是一个开源的生成式物理引擎,专为机器人和物理AI的仿真平台设计。它能够精确模拟现实世界中的各种复杂物理现象,提升机器人开发和AI训练效率。刚开源一天便获得了超过9,000个星标。该引擎具备物理引擎、轻量级机器人仿真平台、强大的渲染系统及生成式数据引擎四大核心能力,支持实时高速仿真,并在多个应用领域展现出巨大优势。