
最近倒腾了一波RLHF,从ColossalAI到TRLX以及DeepSpeed-Chat,最后基于DeepSpeed-Chat成功训练上了自己的模型,最后效果也是肉眼可见的提升。对这一部分进行下总结,包括原理,代码以及踩坑与解决方案。
基本概念
首先还是解释一下一些概念,从NLP的角度举一些例子。
首先是RL中的Policy,State,Action。
-
• Policy π:这是我们需要学习的策略函数,我们使用语言模型来近似这个函数。 -
• State S:模型接受的输入句子,这里的话状态是无限的,因为输入可能为任意句子。 -
• Action A:根据所处的状态,策略函数做出动作。这里的话就是模型接受上文,预测下一个字符。这里的动作是有限集合,大小为vocab size。

接下来介绍Reward,Return,Q,V。
-
• Reward(奖励):在t时刻,给定上文 ,预测下一个字符 ,所获得的奖励 。 -
• return(回报):在t时刻,给定上文 ,持续预测下一个字符,获得奖励,直到生成结束符,到达最终状态,获得奖励,所获得的奖励和 。 -
• Q(动作的价值):在t时刻,给定上文 ,预测下一个字符 ,可以获得所有奖励的期望。 。 -
• V(状态的价值):在t时刻,基于给定上文 ,可以获得所有奖励的期望 。 。这里就是在上文 状态下,求和所有下一个字符出现概率与字符对应价值的乘积。
PS:这里要注意区分价值和奖励:价值是未来累计奖励的期望。奖励是我们做出该动作后立即获取的收益。
RLHF过程
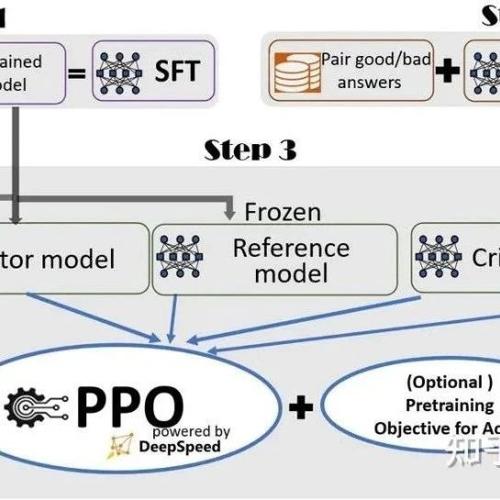
整个过程主要是分为三步:SFT, Training Reward Model,RLHF。
这里主要介绍一下Training Reward Model和RLHF。
Step2:Training Reward Model
数据
首先是这一部分数据的构成,每一条数据由query,chosen response, rejected response构成,chosen response相较于rejected response质量更高。我使用的数据来自Cohere/miracl-zh-queries-22-12[1],里面对于每条query包含了positive_passages和negative_passages两个部分,positive部分可以视为chosen,negative部分视为rejected,就可以采样构建我们训练Reward Model的数据了:
{
"query": "联合国总部在哪里?",
"chosen": "联合国总部大楼(亦称联合国大厦)是联合国总部的所在地,位于美国纽约市曼哈顿东侧,属于国际领土,因此只要是会员国国民持有护照就可以进入,包括与美国无邦交的联合国会员国。联合国总部大楼位于纽约市,其西侧边界为第一大道、南侧边界为东42街、北侧边界为东48街、东侧边界为东河,从联合国总部大楼可以俯瞰东河。此大楼于1949年和1950年间兴建,土地购自于当时的纽约房地产家,面积阔达17英亩(约6.87973公顷)。在此之前,洛克斐勒家族有意提供其在纽约州威斯特彻斯特郡洛克菲勒庄园的土地,但因距离曼哈顿遥远而作罢;之后,纳尔逊·洛克菲勒便协助新的土地的购买,其父小约翰·戴维森·洛克菲勒则捐助了850万美元协助兴建大楼。",
"rejected": "联合国的15个专门机构(如教科文组织)都没有设在总部。然而,有一些“自治附属机构”(如联合国儿童基金会)的总部设在联合国总部。"
}模型结构
Reward Model相较于原始的SFT Model,在后面加上了一个value head,value head是一个Linear,输入维度为模型的hidden_dim,输出维度为1,输出表示模型预测每一字符获取的得分。DeepSpeed-Chat中使用最后一个字符的得分作为整个response的得分(当然也可以使用整个句子中每个字符的平均分作为整体的得分)。

训练目标
训练Reward Model是一个排序任务,针对query,输入chosen和rejected response,训练目标尽可能的使得chosen和rejected的差值更大,损失函数为:
以上就是第二步Training Reward Model的全部过程,基于rank loss训练了一个打分模型。在第三步强化学习中,reward模型将扮演环境的角色,针对模型预测的字符给出奖励分数。
Step3:RLHF
整体结构
首先来从整体上看一下这部分(这里就只介绍RL部分,PTX就是加上了预训练任务):

RLHF基于A2C方法,这一步包含了四个模型:
-
• Actor Model:由SFT之后的模型初始化而来。作为策略(policy)模型,用于接收上文,做出动作,预测下一个字符。学习完毕之后,我们最终使用的就是这个模型。 -
• Reference Model:和Actor Model同样初始化自SFT Model,训练过程中冻结参数,用于和Actor Model做对比,保证模型不要偏离原始SFT Model太多。 -
• Reward Model:作为环境(env),训练过程中冻结参数,针对每一个状态,给出奖励分数。 -
• Critic Model:由Reward Model初始化而来,用于近似价值函数,输入为状态s,估计当前状态的价值V。
训练过程
接下来梳理一遍训练过程。训练过程整体分为两步:maker experience和learn。
首先是make_experience,首先在训练数据中抽取一部分query,然后Actor Model生成答案。然后我们依据这条答案获取我们所需要的经验:
-
• actor_logits:由Actor Model产生,包含对答案所有词的概率分布。 -
• reference_logits:由Reference Model产生,包含对答案所有词语的概率分布,用于和actor logits进行对比,防止actor model偏离SFT Model太远。 -
• reward_score: 由Reward Model产生,为当前句子状态下,立即获取的收益分数。 -
• values:由Critic Model产生,估计当前句子状态下,到完成生成,可以获取的回报。
整体流程如下:

然后在learn的时候,通过所产生的经验进行学习。我们通过Actor Model与Critic Model近似策略函数和价值函数,整体流程如下:

关于learn这部分,详细介绍下Critic Model训练和Actor Model训练过程。
这里对下标new和old做一下说明(最近自己复习一下,看自己的文章,想了半天也没想起,最后被迫又去看代码了,可恶)
问:这里获得的actor prob 和 之前 make experience中获得的有什么区别,为什么要区分old和new, 包括critic也是?
答:因为模型会有dropout 所以会有一些区别。 此外如果ppo_epoch大于1, 那么actor产生经验之后,在forward, backward之后,也会有不同[2]
Critic Loss
Critic Model估计当前状态可以获取的价值,也就是我们前面所说的V值。模型的输入为状态s,也就是当前模型生成的句子,输出为状态价值 V(s) 。
这里有一个重要的近似(基于t时刻的状态s的价值=t时刻获取的奖励 +折扣率 时刻状态 的价值):
因此,我们在make experience的时候产生 , 使用其估计Critic Model的目标值 。 为TD target,是Critic Model在t+1时刻,对 做出的估计。
在learn的时候,我们计算当前Critic Model的最新预测值 ,用其估计。由于中包含真实观测奖励,因此更为接近真实目标,我们需要将 进行对齐,使得Critic Model预测的value更接近真实值。可以使用MSE损失来优化Critic Model,这部分损失表示为:
这里举一个例子:
早上起床去公司,地图预计通行时间是50min,然后走了10分钟到马连洼,地图预计用时还需要三十分钟。那么一开始预估的总体时间是50min,而基于一部分真实观测的总体时间是10+30=40min, 那么我们最终的误差就是(10+30 – 50) **2啦。

Actor Loss
Actor model基于当前输入上文s,预测下一个字符的概率分布 。
基于策略梯度算法,我们期望最大化状态价值,因此目标函数
但是基于这种方法,我们很多时候无论采取何种动作,我们得到的预期回报 只要大于0,我们模型就会向这个动作方向更新。
举个例子,如果我们模型有“上,下,左,右”四个动作,分别有累计奖励“10,20,30,40”,我们做出任意动作,都会获取正向的累计奖励,因此模型也会向这个动作更新参数。而实际上,我们累计奖励的平均期望为25,对于动作“上,下”我们都应该受到惩罚。
因此我们需要引入一个基线来作为参考,在A2C方法中,引入基线为状态价值 ,为状态s的平均预期回报 。因此我们的目标函数变为:
其中 为优势值,
最后,我们在通过PPO算法来进一步优化。关于PPO详细讲解,可以看我的文章PPO详解。PPO的想法是希望限制训练过程中对policy进行的更改,避免policy进行过大的更新,来提升policy训练的稳定性。基于PPO算法,我们的目标函数变为:
其中 。ratio用于比较当前策略和之前旧策略之间的变化,同时将其限制在区间 之中。
以上就是第三步的核心内容,RL过程整体分为两步,make experience和learn。我们首先采样数据,然后生成结果,Reward Model给出环境的奖励,以及Critic Model对结果进行评判。之后我们依据所获取的经验来对模型进行更新。
DeepSpeed-Chat实践与踩坑
Step2 Training Reward Model
这个步骤基本就是全部按照DeepSpeed-Chat代码来了,使用cohere-zh的数据,大约构造了2w条chosen-rejected pair用于训练。最后训练训练了一个epoch,在验证集上准确率到了0.79左右。
***** Evaluating reward, Epoch 1/1 *****
step: 499/2287, chosen_last_scores (higher is better) : 5.074454307556152,reject_last_scores (lower is better) : 0.5599770545959473, acc (higher is better) : 0.812000036239624
step: 999/2287, chosen_last_scores (higher is better) : 5.084388732910156,reject_last_scores (lower is better) : 0.7938708662986755, acc (higher is better) : 0.7940000295639038
step: 1499/2287, chosen_last_scores (higher is better) : 5.106724262237549,reject_last_scores (lower is better) : 0.7971451878547668, acc (higher is better) : 0.7986666560173035
step: 1999/2287, chosen_last_scores (higher is better) : 5.0183587074279785,reject_last_scores (lower is better) : 0.672178328037262, acc (higher is better) : 0.7955000400543213
chosen_last_scores (higher is better) : 5.028912544250488,reject_last_scores (lower is better) : 0.7077188491821289, acc (higher is better) : 0.7936161160469055Step3 RLHF
踩坑&解决方案
在这个步骤中,从跑通到收敛还是有不少麻烦,分享一些比较重要的点:
训练过程中发现make experience的时候,model.generate()产生的答案全是重复的无意义字。这里就很奇怪了,最后发现是开启了DeepSpeed Hybrid Engine所导致的,查看了issue之后,也发现了有类似的问题[3]。
不过目前DeepSpeed-Chat也没有解决,需要关闭Hybrid Engine进行训练。
DeepSpeed-Chat还有一个很严重的问题就是,在make experience的时候,强制Actor Model生成到最大长度(设置max_length=min_length=max_min_length),这样子导致模型生成偏差很大。对于一个简单的问题,模型可能本来生成简单的一句话就可以完美回答了,但是却必须强制生成到最大长度,这样训练的模型和我们实际用起来的模型是有区别的。
对于这个问题,可以通过修改generate中的参数eos_token_id来解决。设置一个虚假的结束符,然后模型就可能生成正常的结束符。然后我们在构建attention_mask来遮蔽掉结束符后面的回答。例如:
seq = [0,0,0,0, prompt, answer, eos_token, other_word]
mask = [0,0,0,0,1(prompt),1(answer),1(eos_token),0(other_word)]通过以上两步基本就可以跑通流程了,但是训练过程中还遇到了一个比较大的问题,就是Critic Loss并不收敛,越来越大。
具体的原因是:训练后期,随着模型输出答案越来越好,我们的reward值也会越来越高,导致我们最终累计回报return的区间也会越来越大。而前面说过,我们Critic Loss是一个MSE损失,因此训练后期,随着return的估计范围越来越大,Critic Model就越难估计。在我训练的过程中,一开始return的范围是在3-4左右,训练后期涨到了18-20,因此我们需要想点办法来约束一下我们的return。
首先的超参的调节,γ参数为折扣回报率,DeepSpeed-Chat中初始设置为1,可以将其调小一些来缓解。其次的话,使用reward scale这一trick帮助也非常大。
通过以上这些步骤,基本上我们正常训练了,模型最后也能看到一些效果,但是需要取得更好的效果,我们就需要引入一些trick了。
Trick
trick方面主要参考了The 37 Implementation Details of Proximal Policy Optimization[4]以及影响PPO算法性能的10个关键技巧(附PPO算法简洁Pytorch实现)[5]。对于部分trick,进行了尝试。
Normalization of Advantages
-
• 将Advantage进行归一化:adv=(adv-mean)/std -
• 在mini-batch上进行 -
• 没有指标的量化,从我个人看结果而言,感觉提升不大
Overall Loss and Entropy Bonus
-
• 为了提高算法的探索能力,在actor的loss中增加一项策略熵,并乘以一个系数entropy_coef,使得在优化actor_loss的同时,让策略的熵尽可能大。一般我们设置entropy_coef=0.01 -
• 总体损失变为:loss = policy_loss – entropy * entropy_coefficient + value_loss * value_coefficient -
• 没有指标的量化,从我个人看结果而言,感觉没有太多提升
Reward Scale
-
• 对reward进行缩放,将reward除以标准差 -
• 从训练log来看,对稳定critic loss效果很好,毕竟将reward 进行缩放之后,降低了return的估计区间。 -
• 没有指标的量化,从我个人看结果而言,提升很大,推荐使用。
关于其他的一些trick,如学习率衰减、梯度裁剪、Value Clipping等,本身框架就包含了,就不进行特别说明了。当然,这些trick在不同的数据或者模型上都会有不同的效果,需要自己进行探索。
通过以上这些方法,最后也顺利的完成了训练,希望对大家能有所帮助,也希望大家能分享自己有用的经验与理解,关于RL自己了解的也很少,还需要更多的学习。
引用链接
[1] Cohere/miracl-zh-queries-22-12: https://huggingface.co/datasets/Cohere/miracl-zh-queries-22-12/viewer/Cohere–miracl-zh-queries-22-12/train?row=0[2] 不同: https://github.com/deepspeedai/DeepSpeedExamples/issues/533[3] 类似的问题: https://github.com/deepspeedai/DeepSpeedExamples/issues/503[4] The 37 Implementation Details of Proximal Policy Optimization: https://iclr-blog-track.github.io/2022/03/25/ppo-implementation-details/[5] 影响PPO算法性能的10个关键技巧(附PPO算法简洁Pytorch实现): https://zhuanlan.zhihu.com/p/512327050
(文:机器学习算法与自然语言处理)