
字节开源高效解析文档图像的新型多模态模型Dolphin,快速将复杂的文档图像转化为结构化数据。
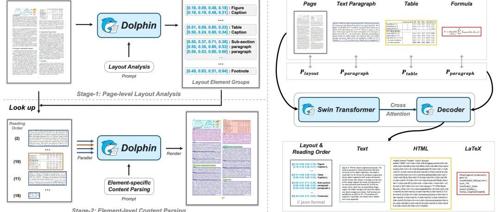
Dolphin是基于单一视觉语言模型的两阶段文档图像解析模型,采用自然阅读顺序生成元素序列和异构锚点提示进行高效并行解析。支持页面级和元素级解析,性能卓越。
Dolphin是基于单一视觉语言模型的两阶段文档图像解析模型,采用自然阅读顺序生成元素序列和异构锚点提示进行高效并行解析。支持页面级和元素级解析,性能卓越。

研究团队提出ManipTrans方法,通过两阶段迁移学习实现从人类手到机械灵巧手的操作技能转移。该方法利用通用轨迹模仿器预训练模型模仿人类手部动作,并引入残差学习模块对动作进行精细调整。同时发布DexManipNet大规模数据集用于验证。