SmolVLA: 让机器人更懂 “看听说做” 的轻量化解决方案 2025年6月5日14时 作者 Hugging Face 参数) 的开源视觉 – 语言 – 动作 (VLA) 模型,专为机器人领域设计,并且可以在消费级硬件
机器狗玩滑板碾压人类?密歇根大学与南方科技大学联合推出DHAL框架,让四足机器人滑板“开挂”! 2025年3月25日16时 作者 机器人大讲堂 着技术的进步,从日常生活协助到复杂任务执行, 四足机器人等腿式机器人在越来越多场景被广泛应用。 然而
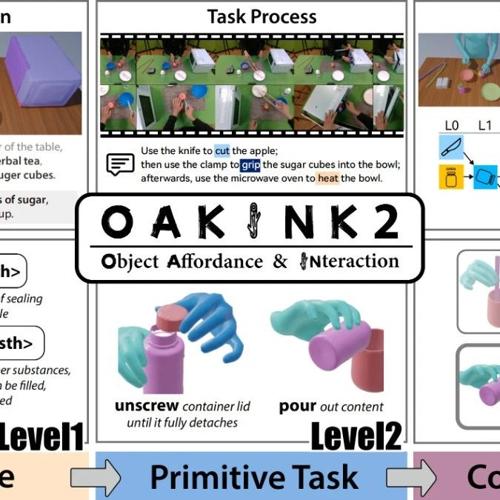
三层框架系统化解构双手操作!穹彻x上交大联合发布 OakInk2数据集,实现量质维三重飞跃! 2025年3月18日23时 作者 机器人大讲堂 复杂任务的高超能力。这种能力在常人看来或许平常,但对机器人而言,要想进行复现却面临巨大挑战。 究其原
IBM 八大专家预测:现代编程语言是给人类设计的,AI 需要类似汇编的原生语言 | AI 2025 2025年1月2日23时 作者 AI科技大本营 “在未来几年的一个大挑战是,我们可能会看到一种更适合智能体的原生语言出现,这种语言的设计更适合 LL