
AI无师自通,搞定所有家务!π0.5突破泛化极限,UC伯克利系出品
新智元报道
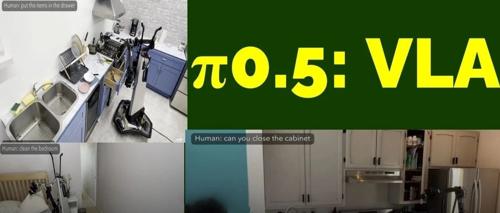
具身智能公司Physical Intelligence推出π0.5 VLA模型,通过异构任务协同训练实现广泛泛化能力,机器人能在多种环境中完成复杂任务。
新智元报道
具身智能公司Physical Intelligence推出π0.5 VLA模型,通过异构任务协同训练实现广泛泛化能力,机器人能在多种环境中完成复杂任务。

芜湖!机器人开始走出实验室,走进家庭,能做家务了。Figure的最新研究成果——视觉-语言-动作(VLA)模型Helix,让两台搭载该模型的机器人共享同一智能大脑,通过自然语言指令进行分工合作。
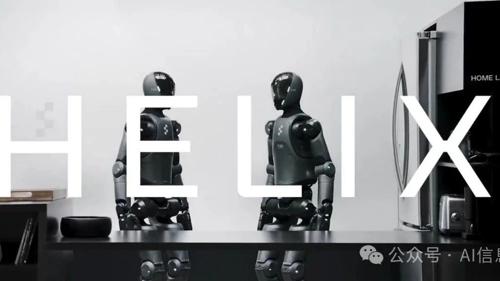
Figure发布最新AI人形机器人模型Helix,具备识别和操作数千种家用物品的能力,并能执行复杂任务,如整理冰箱、与另一台机器人协作完成家务等。

本文介绍了一种名为GRAPE的新算法,用于改善视觉-语言-动作模型在机器人任务中的泛化能力。通过偏好对齐提升策略的灵活性和适应性,支持多种目标如安全性和效率。