

磁性软体微机器人因其可通过外部磁场远程驱动,并具备良好的柔顺性和可操控性,在生物医学介入治疗领域展现出潜力。然而,这类机器人在复杂生理环境中的实际应用面临对动态地形的适应性不足以及多模态运动控制的稳定性较差等诸多挑战。
近年来,众多研究人员针对磁性软体微机器人的多模态运动和形态变化控制展开了广泛研究。这些研究虽然在一定程度上增强了机器人的适应性和运动多样性,但仍存在局限性。例如,部分方法需要机器人整体嵌入磁性材料,这限制了其功能扩展;同时,仅依赖磁场控制的机器人通常只能维持单一稳态,难以应对复杂环境中快速变化的地形需求。

图1 海洋蛞蝓蜷缩形变逃离危险(来源:《The·Blue·Planet》)
在海洋中,海蛞蝓和海马等软体动物在环境刺激下能够改变并维持不同身体形态,以适应复杂且不断变化的海洋环境,并且基于不同的形态特征演化出了自适应移动方式,为面向液相环境任务作业的磁性软体微机器人的仿生设计提供了重要参考。
面对复杂的活体环境,如何像海洋生物一样可以自主切换本体形态并改变运动方式以应对地形的多元变化,增强其复杂环境适应性与多变地形通过性,是磁驱动软体微机器人实现高效运动的研究重点。
▍受海洋蛞蝓启发,开发STFM-Robot
面对这一挑战,来自北京理工大学的王化平教授团队在国家重点研发计划、国家自然科学基金等项目支持下进行了深入研究。受海洋蛞蝓形态自适应机制启发,研究团队创新性开发了一种基于“环境刺激 – 磁场激励”协同的双稳形态仿生软体微机器人STFM-Robot(soft thin-film millirobot),有效解决了封闭复杂环境下的自主导航与精准作业难题。
该机器人采用生物降解水凝胶作为主体,可响应环境刺激在两种稳定形态之间进行可逆切换,从而实现多模态运动和靶向细胞递送。这使得机器人在面对不同环境时,能够灵活调整自身的形态和运动模式,以适应复杂多变的地形。
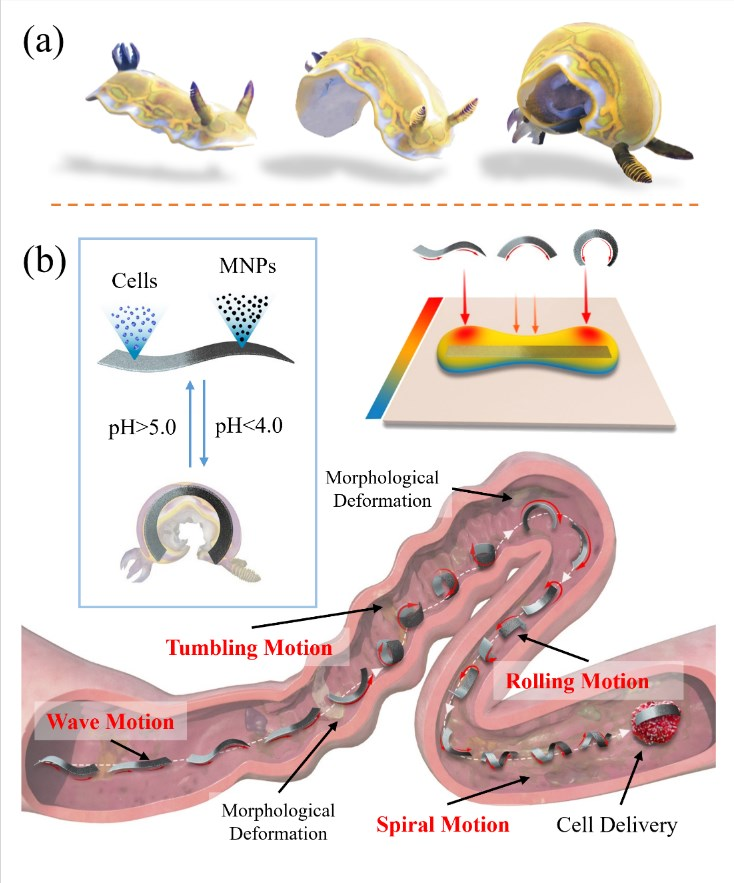
图2 机器人水凝胶本体的非均质电沉积调控原理及双稳形态薄膜软微机器人的设计 (a)海蛞蝓蜷缩形变。(b) STFM-Robot的电沉积制备和磁控多模态运动示意
为了全面验证STFM-Robot的性能,研究团队进行了多项实验测试。实验结果表明,STFM-Robot能够有效切换其形态和运动模式,以在各种地形中导航,包括仅1毫米宽的狭窄和弯曲通道、倾斜15°的0.8毫米高楼梯,甚至复杂的猪肠道内环境。其功能尾部可精准递送免疫细胞至指定位置,展现出在靶向药物运输和癌症治疗中的潜在应用价值。
近日,该研究成果的相关论文已以《Dynamic Control of Multimodal Motion for Bistable Soft Millirobots in Complex Environments》为题发表于机器人领域顶级期刊《IEEE Transactions on Robotics》,北京理工大学为第一完成单位,机电学院辛正远、钟世豪为共同第一作者,王化平教授为通讯作者。

图3 研究成果发表相关信息
▍构建双稳态结构,实现多模态运动
海蛞蝓和其他腹足类软体动物能够卷曲身体成球形以响应外部刺激,从而实现快速滚动。海马则能够卷曲尾巴以保持特定曲率,以便抓握珊瑚保持稳定。研究团队受这些海洋软体动物的形态-运动协同机制启发,设计了一种由生物降解水凝胶非均质固化交联聚合而成的STFM-Robot。
海藻酸盐水凝胶因其强生物相容性和优异的细胞粘附性能,在生物医学工程领域备受关注。此外,其在液体环境中的可溶解性也解决了机器人进入体内后的回收难题,使其能够轻松进入人体并在内部进行操作,同时根据需要携带药物或细胞。基于这些特性,研究团队在材料选择上,采用了海藻酸盐水凝胶作为STFM-Robot的主体构成材料,并采用矩形结构,其长轴3毫米、短轴0.6毫米、厚度200微米。
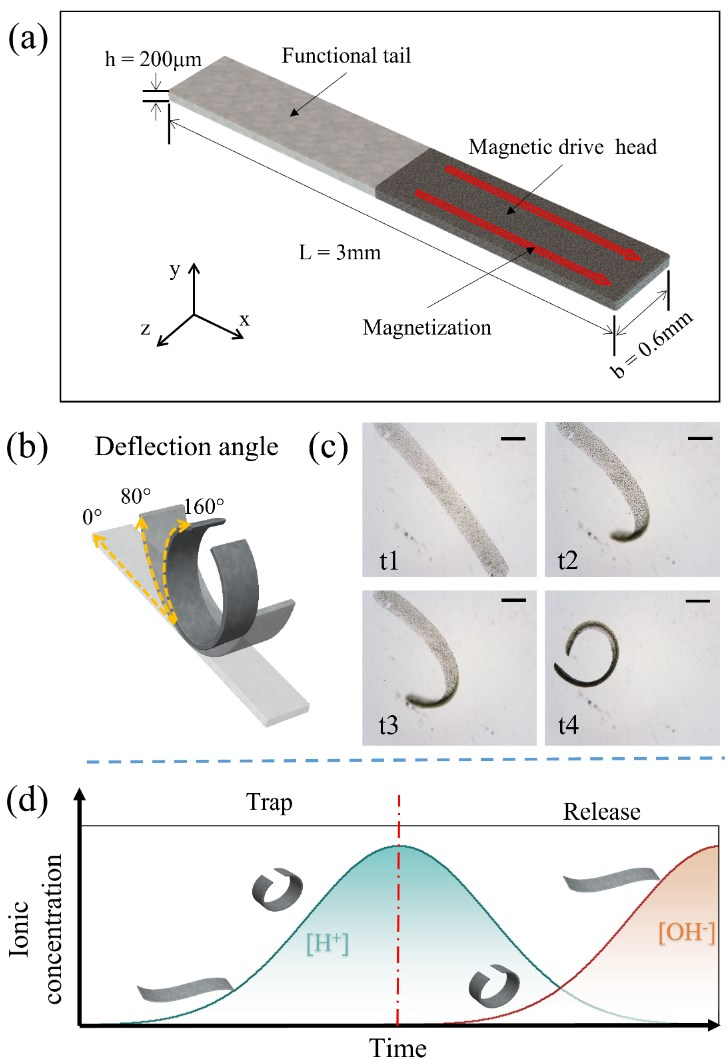
图4
制备过程中,研究团队通过电极沉积法制备了非均匀梯度网络结构的水凝胶主体。这种结构使机器人能够响应pH值和离子浓度的变化,在酸性环境下实现180°范围稳定弯曲的环状形态,而在碱性环境下则恢复初始条状形态。这种仿生双稳态特性赋予机器人类似海蛞蝓的“遇窄则蜷、遇阔则展”的环境自适应形态切换能力,为多模态运动提供了基础。
同时,STFM-Robot兼具磁性驱动头部和功能尾部。为确保在生物系统中的安全性,研究团队选用了具备生物相容性的Fe3O4(磁铁矿)粉末作为磁性材料制作头部。在头部和尾部的协同作用下,STFM-Robot能够在两种稳定状态之间实现可逆切换,并执行靶向细胞递送任务。
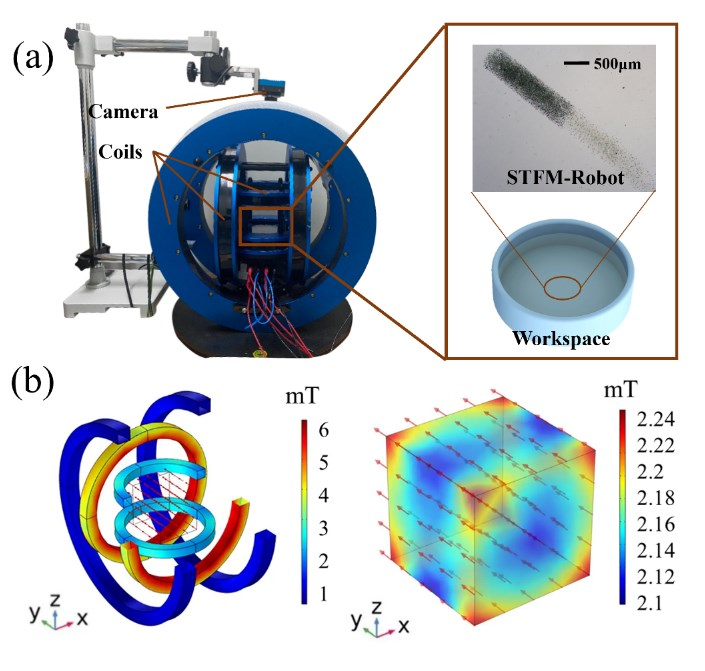 图5
图5
基于STFM-Robot的环境响应性可逆形态变形能力,结合环境刺激和磁场推进,研究团队还开发了一种分层控制方法,实现了机器人在双形态下的多模态运动。这一创新设计使得STFM-Robot在生物医学领域具有广泛的应用前景。
▍磁驱与算法助力,实现复杂地形自主运动
为了使STFM-Robot能够快速切换运动模式以适应多样地形环境,研究团队开展了一系列工作。
在运动模式方面,研究团队为STFM-Robot设计了四种仿水生生物运动模式,并建立了“磁矩 – 流体阻力”耦合动力学模型,以揭示其运动规律。
-
波动运动
通过施加平面振荡磁场,条状形态微机器人柔性尾部受磁性驱动头部牵引产生滞后振荡实现摆尾推进,推进速度与磁场频率正相关,最大速度可达3倍身长每秒,该模式作为主要推进模式,能让机器人灵活导航狭窄和复杂地形。
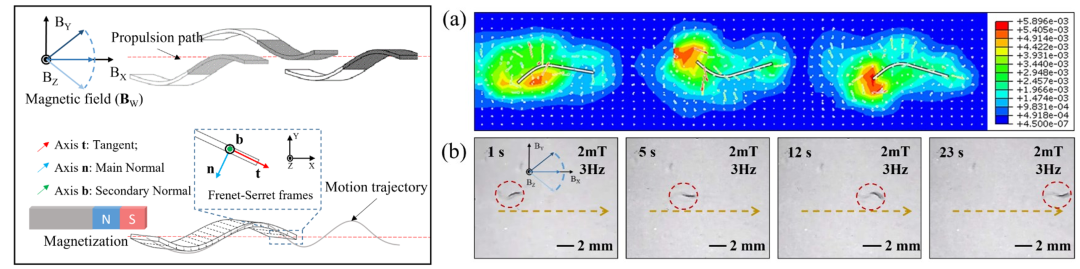
图6 波动运动原理、仿真及实验
-
滚动运动
通过施加旋转磁场驱动头部磁矩,条状形态微机器人基于磁矩-接触摩擦力耦合实现推进(接触面摩擦主导推进),最小转向半径趋近于机器人本体尺寸,与自身宽度等同的极限窄道内可实现原地180°转向,切换延迟≤0.3 s,该模式占地空间小,增强了机器人在狭窄和复杂空间的机动性。
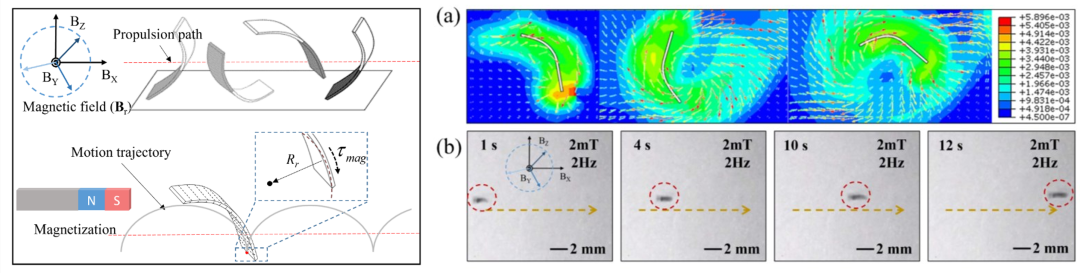 图7 滚动运动原理、仿真及实验
图7 滚动运动原理、仿真及实验
-
螺旋运动
通过施加锥形旋转磁场,可激发条状微机器人柔性尾部扭转变形,产生螺旋推进力,在高粘度环境(0.3%甲基纤维素溶液,模拟血液)中高效推进,较波动模式效率提高3.2倍。
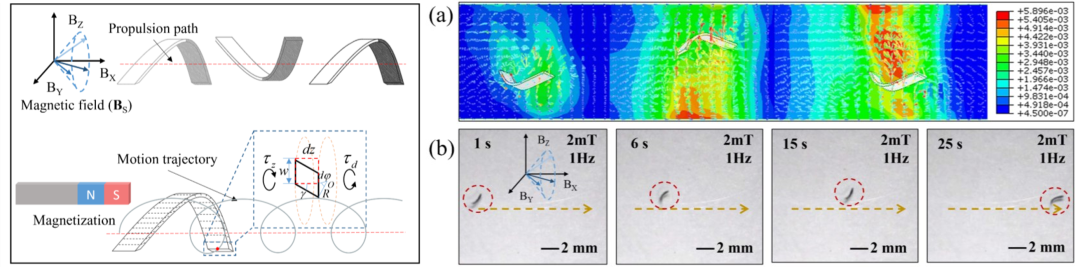
图8 螺旋运动原理、仿真及实验
-
翻滚运动
通过施加同平面旋转磁场,环状形态微机器人(相较于条状形态长度缩减约1/3),利用刚度提升(弹性模量增加2倍)实现侧向滚动,可高效通过斜坡或台阶等复杂地形。
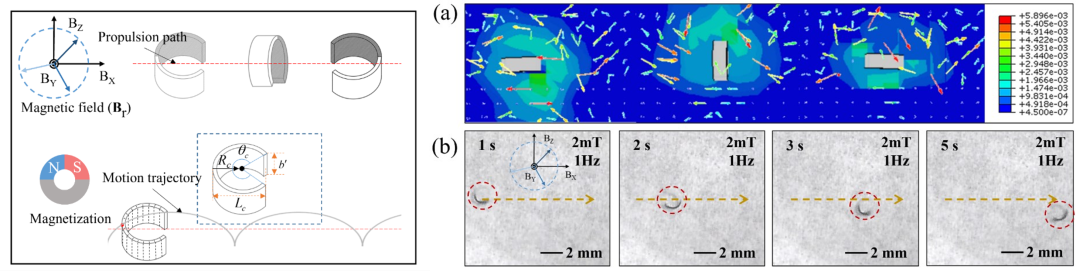
图9 翻滚运动原理、仿真及实验
在运动决策方面,为实现复杂地形下的实时运动决策,团队提出“环境感知 – 知识图谱”协同控制框架。基于“磁矩 – 流体阻力”耦合动力学模型,将不同磁场参数下的四种运动模式封装为运动基元,形成可调用的指令库。
同时,研究团队也建立了地形到运动单元的映射知识图谱,利用典型地形特征快速搜索最优运动模式。通过对典型地形特征(如地形曲率、通道宽度等参数)进行量化分析,构建二进制编码的环境特征向量,并利用矩阵映射运算,将地形特征、微机器人双稳形态以及运基元精准绑定,形成了一个完整的“环境感知 – 决策 – 执行”闭环决策图谱。
面对复杂地形,STFM-Robot可任意组合运动基元,并“秒切”最佳运动策略,实现自主适应与高效穿越。实验表明,该算法在猪肠离体模型中可实现95%以上的模式切换成功率,路径跟踪误差小于体长10%。
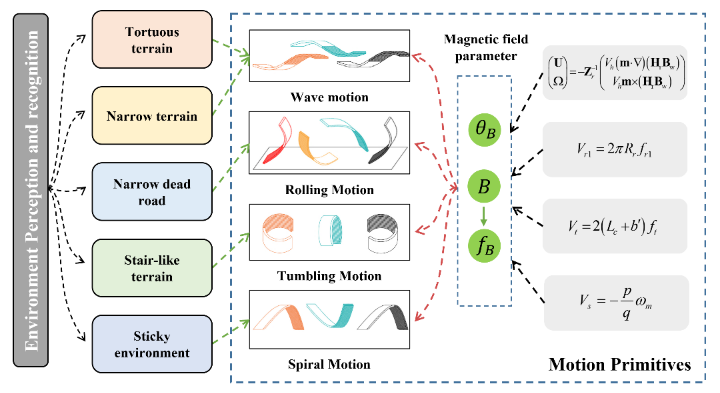
图10 运动模式的动态映射
▍进行多项测试,验证机器人性能与应用潜力
为了验证STFM-Robot在体内环境中的操作能力和适应性,研究团队开展了系列实验。
在离体肠道实验中,研究团队选用了猪的大肠作为模拟环境,观察并记录机器人在肠道内的运动轨迹、速度、形态变化,以及其在狭窄、弯曲等复杂区域的通过情况,以此评估机器人在复杂生物腔内的导航和性能表现。
实验显示,STFM-Robot可通过外部磁场遥控,在肠道内灵活导航,借助形态变形和运动模式切换适应复杂多变的环境,且未出现明显损坏或失效。这表明该软体毫米机器人能适应肠道的自然形态和弹性,在运动过程中保持稳定的形态和功能,为其在体内长期应用提供了有力支撑。
为了进一步验证STFM-Robot在复杂地形中的多模态运动能力和其在生物医学治疗中的潜在应用,研究团队设计了一系列实验,展示了机器人在不同地形下的运动表现,并评估了其携带免疫细胞进行靶向治疗的效果。
在地形实验中,研究团队设计了S形曲线、极窄通道、楼梯状地形等多种复杂地形模拟装置。实验中,STFM-Robot能够根据地形灵活切换运动模式。这不仅提高了机器人的通过性,还为其在体内的精准定位和治疗提供了更多可能性。
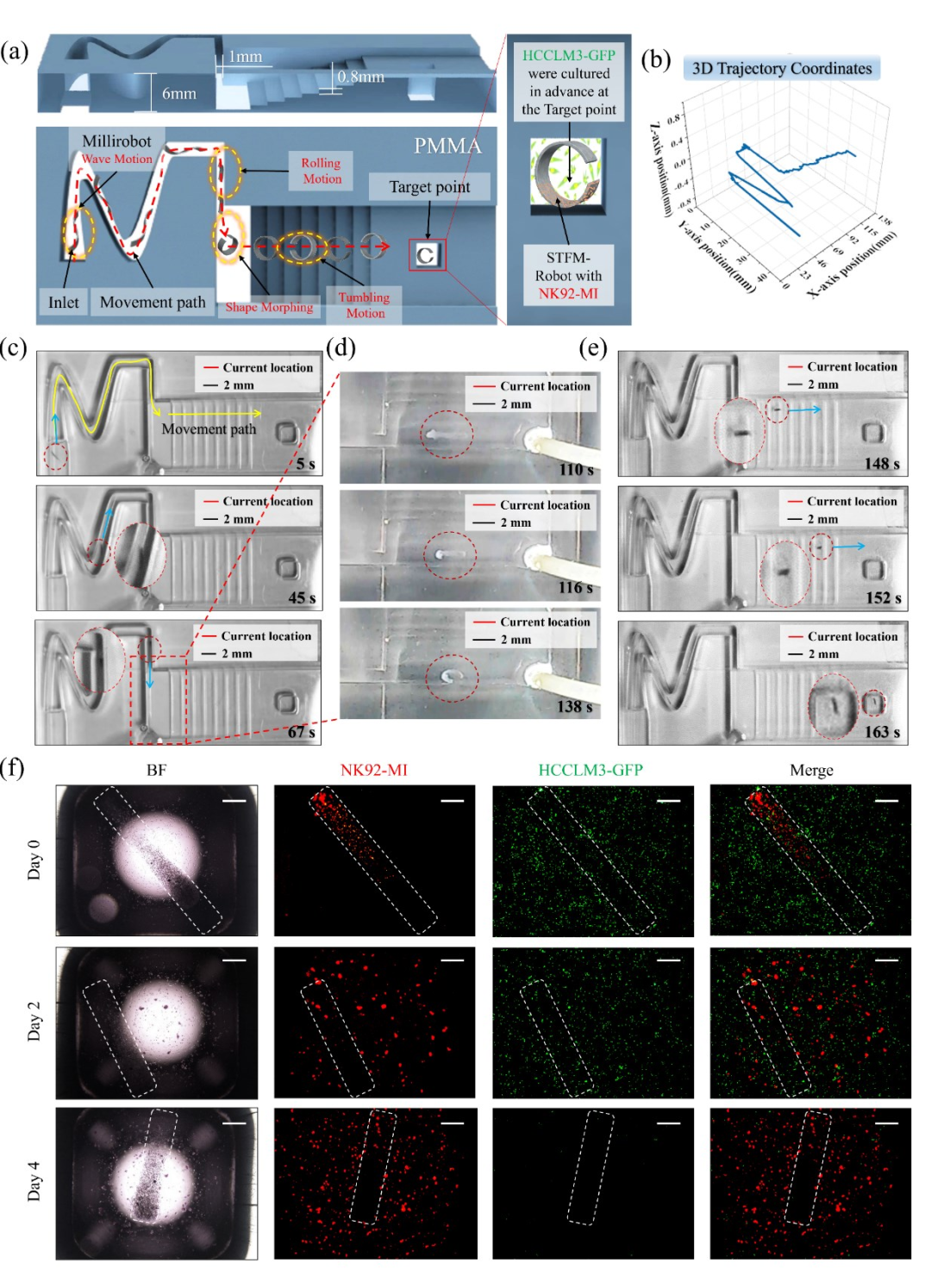
图11 靶向细胞递送实验
在携带免疫细胞进行靶向治疗的实验中,研究团队在STFM-Robot功能尾部装载了NK92-MI免疫细胞(红色荧光标记),并将其放置在设计的复杂三维封闭环境中。通过多模态运动动态切换,STFM-Robot精准抵达至预植HCCLM3-GFP肝癌细胞(绿色荧光标记)区域完成免疫细胞靶向投递与增殖,实现了对癌细胞的靶向杀伤。体外实验表明,STFM-Robot在模拟癌症治疗场景中展现出高效的靶向清除能力,4天内可实现100%癌细胞清除率,通过荧光面积分析发现免疫细胞活性维持率>90%。
论文链接:
https://ieeexplore.ieee.org/abstract/document/10925928
(文:机器人大讲堂)