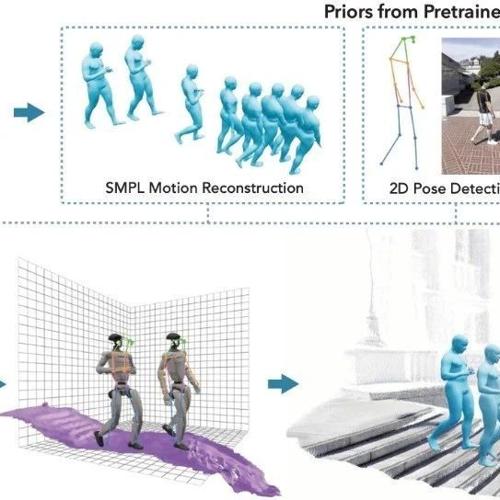
UC Berkeley最新VideoMimic的框架:基于视觉模仿学习的类人机器人跨环境控制策略生成方法 2025年5月25日23时 作者 机器人大讲堂 近日UC Berkeley大学研究人员提出VideoMimic框架,通过观看普通视频自动生成类人机器人的控制策略。无需复杂传感器数据或手工奖励函数,机器人能在多种环境下执行任务。