
UC Berkeley最新VideoMimic的框架:基于视觉模仿学习的类人机器人跨环境控制策略生成方法
近日UC Berkeley大学研究人员提出VideoMimic框架,通过观看普通视频自动生成类人机器人的控制策略。无需复杂传感器数据或手工奖励函数,机器人能在多种环境下执行任务。
近日UC Berkeley大学研究人员提出VideoMimic框架,通过观看普通视频自动生成类人机器人的控制策略。无需复杂传感器数据或手工奖励函数,机器人能在多种环境下执行任务。

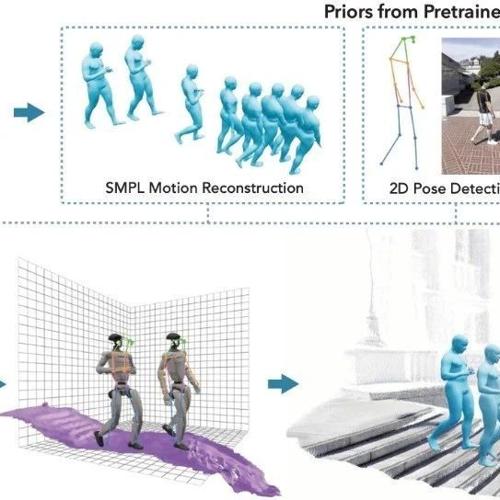
UC伯克利团队研发的新系统VideoMimic能够通过视频训练机器人模仿人类动作,已成功让宇树G1机器人学会多种复杂动作。系统利用深度相机和IMU等传感器获取环境信息及机器人姿态,并将这些数据作为策略模型的输入进行实时推理控制。