


自驾场景的可控生成和长时序生成?这个模型全都要!
——港科大和地平线联合提出 DrivingWorld:基于视频 GPT 构建自动驾驶世界模型
DrivingWorld 的主要作者是来自香港科技大学和地平线公司的研究团队,他们专注于世界模型和自动驾驶技术的研究,力求在这两个领域做出更多的贡献。

代码地址:

背景介绍
世界模型(World Model) 是一种可以模拟世界动态的模型,能够基于过去的观测实现对未来状态的预测,因此被视为实现 AGI 的关键途径。世界模型在自动驾驶领域展现了巨大的潜力,不仅具备对环境和驾驶状态的深刻理解,还为未来轨迹预测与自动驾驶决策提供了重要支持。
然而,要通过 World Model 实现高逼真度的驾驶场景生成并非易事。香港科技大学与地平线联合推出的基于自回归架构的 DrivingWorld 模型,为构建精准的自动驾驶世界模型带来了全新突破。

为什么世界模型要采用自回归模型?
同样是输出未来的视频,为什么不采用扩散生成模型(Diffusion Model),而是采用自回归模型?为了回答这个问题,小编向GPT-4o询问了这个问题。

如何实现这一步呢?
美国知名公司 Wayve 率先展示了针对自动驾驶的世界模型 GAIA-1。该模型采用了自回归路线,但是由于其采用的传统 GPT 框架缺乏空间与时间动态建模能力,其生成视频质量与时间都有很大提升空间。
-
高效的视频可量化的编码和解码模块:首次提出视频可量化编码解码器,相比于单张图压缩方案,在降低视频抖动和提升连续性方面取得了明显改进,FID 指标上相对于 SOTA 提升了 17%;
-
解耦时序信息和多模态信息实现可控预测和超长时序预测:DrivingWorld 能够生成未来 > 40s 的 video,相较于当前的 SOTA 方法(最长 15s)在时序长度上有了显著提升;
-
高效的自回归模型设计以实现并行化预测:DrivingWorld 采用了空间-时间先解耦后融合的设计,采用 next-state prediction 的自回归策略,有效降低了 token 预测的时间复杂度,在复杂视频生成任务中展现了良好的性能表现。

4.1 长时序生成
以下展示了一个长时序视频生成的示例。DrivingWorld 在不同帧之间能够捕捉到连贯的 3D 场景结构。

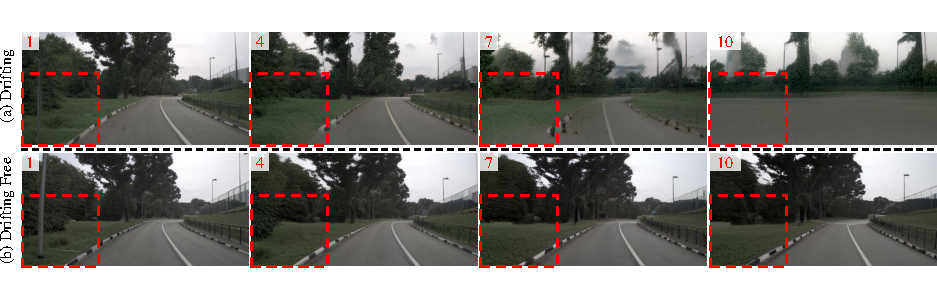
在生成长序列时,模型经常会因为误差积累导致显著的 drift 问题。DrivingWorld 引入了一种有效的 mask token 策略,可以缓解 drift 的影响,从而提升生成质量。
4.3 生成质量评估
DrivingWorld 与现有的 SOTA 方法在 NuScenes 验证集上进行了性能比较。其中,蓝色表示 NuScenes 数据被包含在模型的训练集中,橙色则代表 zero-shot 测试结果。“w/o P” 指未使用私有数据进行训练的情况。具体对比结果如下:
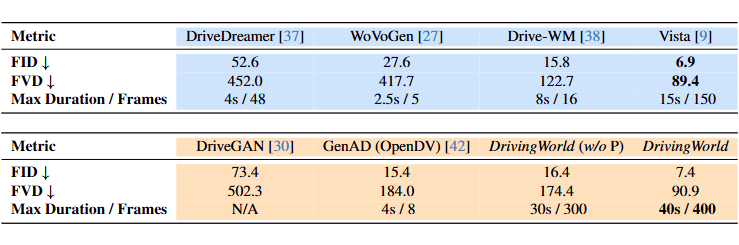
从结果可以看出,DrivingWorld 模型不仅能够生成更长的视频序列(最长达 40s / 400 帧),同时在 FID 和 FVD 上也展现出了较强的竞争力。
4.4.1 可控生成

展望未来,DrivingWorld 还有很大的发展潜力。DrivingWorld 的研究团队计划进一步融入更多模态信息,如车辆传感器数据、地图信息等,并整合多视图输入,如不同角度的摄像头画面。
通过全方位融合多模态和多视角数据,有望进一步提升模型在复杂驾驶环境下的理解能力、动作控制精度以及视频生成的准确性,从而推动自动驾驶系统整体性能和可靠性迈向新的高度,为自动驾驶技术的广泛应用奠定坚实基础。
(文:PaperWeekly)