
ICLR 2025 | DynAlign:跨域语义分割中无监督动态类别对齐的创新突破
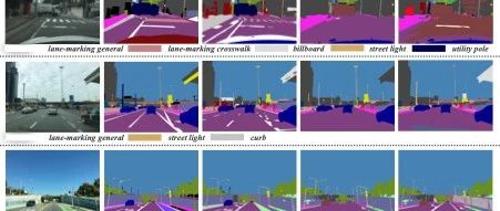
DynAlign 框架通过结合 GPT-4、SAM 和 CLIP,实现了跨域语义分割中前所未有的无监督动态类别对齐能力。该方法无需目标域标注,在智能驾驶和城市管理等场景中表现出色。
DynAlign 框架通过结合 GPT-4、SAM 和 CLIP,实现了跨域语义分割中前所未有的无监督动态类别对齐能力。该方法无需目标域标注,在智能驾驶和城市管理等场景中表现出色。

研究团队开发出四足机器人PAWS,仅用4个电机控制12个关节实现接近生物的自然运动。通过模仿生物协同特性,PAWS展示了惊人的环境适应能力,并揭示了机器设计的新思路。