
在社区实践中,开发者高频反馈亟需打通 RoboMIND 数据格式与主流训练框架的转换通道。为此,北京人形推出 X-Humanoid training toolchain ——适配 LeRobot 框架的工具链,内置 RoboMIND 数据自动解析模块,实现由HDF5 格式向 LerobotDataset V2.1 最新格式的转换。开发者现可通过几行命令完成从数据准备到训练的全流程,提升适配训练效率,真正让创新聚焦算法模型的优化。
在具身智能爆发式发展的背景下,数据来源多、格式不统一导致跨框架、跨硬件的适配成本高已成为制约技术落地的核心瓶颈,为应对这些挑战,面向高效数据使用和机器人研发适配的训练工具链显得尤为必要,它能够有效整合不同框架和硬件资源,提供统一的开发接口,简化开发流程,提升 RoboMIND 数据集和“天工”机器人对于 LeRobot 开源框架适配的的效率,用户可以基于 LeRobot 开源框架的算法实现在 RoboMIND 数据集的使用和“天工”机器人的具身操作,降低开发者开发门槛,扩展 RoboMIND 数据集和“天工”机器人生态建设。
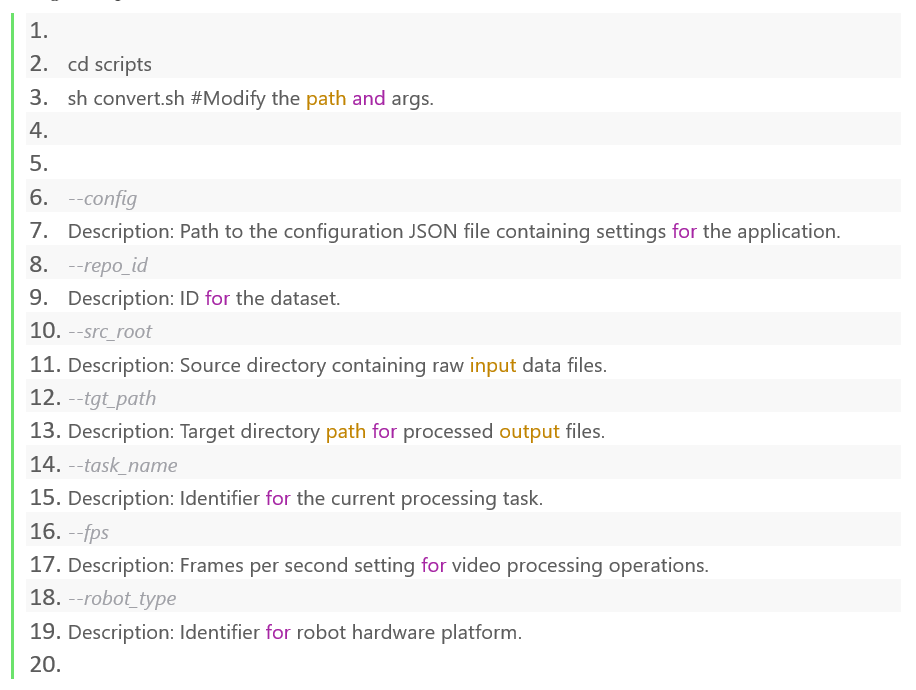
为帮助开发者快速掌握工具链的核心功能,北京人形提供数据预处理到模型训练的全流程操作指南。均可通过简洁的命令行接口实现高效开发。以下步骤将引导您完成关键操作流程,开启具身智能开发之旅。
1、读取 hdf5 格式的数据,根据定义的 keys 解析 observations(如 images、joints 等)。
2、模型训练
将数据集转换为 LeRobot 的格式后,用户可以使用以下工作流程进行模型训练:
-
l 训练配置。 创建一个train_config. json 文件来指定数据集路径、训练算法(例如,ACT 或扩散策略)、超参数(学习率、批大小)和其他相关参数。
-
l 创建配置文件后,用户可以通过执行以下命令开始模型训练:

未来X-Humanoid training toolchain 将持续迭代,一方面,X-Humanoid training toolchain 将支持更多前沿算法,为用户解锁机器人新高度;另一方面,还将支持“天工”系列的具身操作能力,让“天工”机器人在多样化场景中更加得心应手。
在具身智能技术加速迭代的时代,X-Humanoid training toolchain 训练工具链的推出为开发者们打开了通向具身智能机器人高效训练开发的大门。开源工具链的推出不仅为开发者提供了强大的算法适配与训练工具,也为具身智能机器人的规模化应用奠定了基础。随着未来更多前沿算法的引入和生态系统的完善,这一工具链将成为连接科研与产业的桥梁,助力全球开发者共同探索具身智能机器人的无限可能。
北京人形积极拥抱开源文化与开放生态,将开放协作写入技术基因,从大规模多构型智能机器人数据集 RoboMIND 的全面开放,到 X-Humanoid training toolchain 工具链的生态化设计,公司致力于为开发者提供全方位的支持与服务,全方位降低开发门槛,激发创新潜能,加速技术从实验室到产业场景的普惠化落地。
如果您对 RoboMIND 有兴趣,欢迎加入我们的社群进行讨论,与我们携手推动具身智能机器人技术的创新与普及。
X-Humanoid training toolchain
GitHub下载地址:https://github.com/x-humanoid-robomind/x-humanoid-training-toolchainRoboMIND
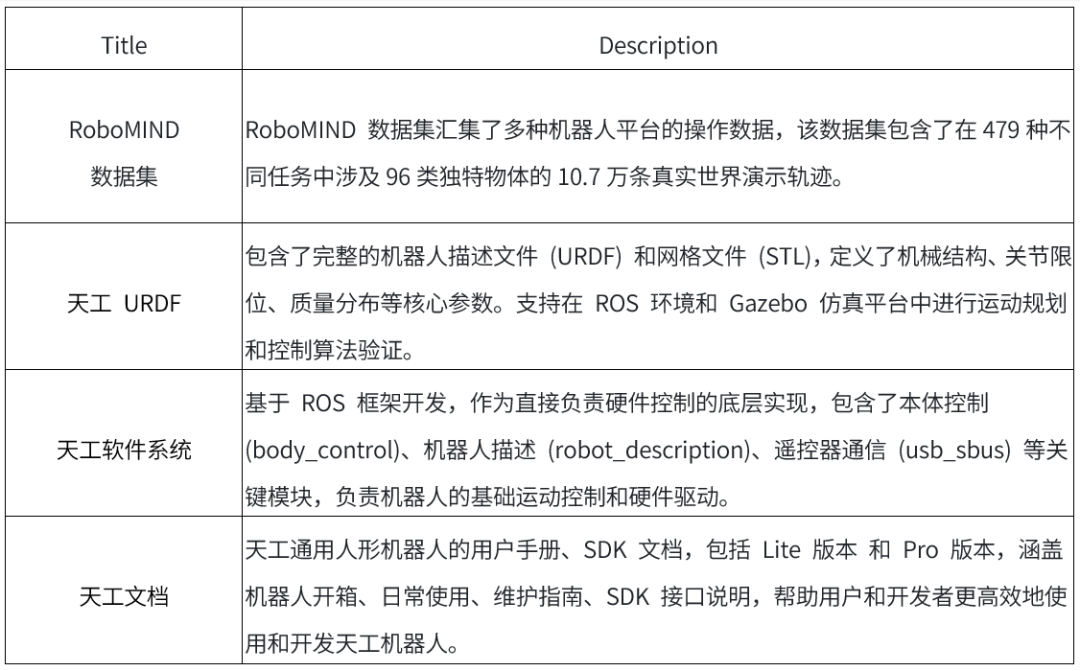
RoboMIND数据集
国内下载地址:https://data.flopsera.com/data-detail/21181956226031626?type=openRoboMIND
HuggingFace下载地址:https://huggingface.co/datasets/x-humanoid-robomind/RoboMIND
来源:北京人形机器人创新中心
(文:机器人大讲堂)