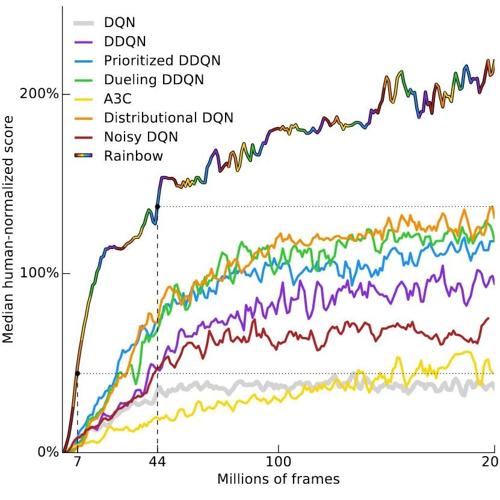
深度强化学习



SIGIR 2025 AgentIR研讨会征稿:探索Agent驱动的信息检索新边界

第二届AgentIR研讨会将于2025年7月17日与SIGIR 2025同期举行,聚焦Agent视角下的信息检索创新。活动将讨论深度强化学习和大语言模型在信息检索中的融合应用及其理论基础、工业应用瓶颈等问题。

稚晖君机器人“葡萄缝针”神技再现江湖,这次是人形的!骑自行车惊呆众人:又抽象又硬核

稚晖君罕见更新视频介绍灵犀X2,该机器人能像人一样骑行并具备多种智能功能。它展示了呼吸韵律、交互能力、抽象思考和运动控制等特性。