
具身智能



具身智能运动会,宇树再次避战

国内首届具身智能机器人运动会即将开赛,《科创板日报》记者实地探访了比赛现场。宇树科技、卓益得等明星企业已提前抵达,并展示最新产品。此次比赛不设竞技环节,主要以展示和测试为主。
机器人也会挤牙膏?ManipTrans:高效迁移人类双手操作技能至灵巧手

研究团队提出ManipTrans方法,通过两阶段迁移学习实现从人类手到机械灵巧手的操作技能转移。该方法利用通用轨迹模仿器预训练模型模仿人类手部动作,并引入残差学习模块对动作进行精细调整。同时发布DexManipNet大规模数据集用于验证。

王者归来!多模态大模型+具身智能彻底爆了。。。
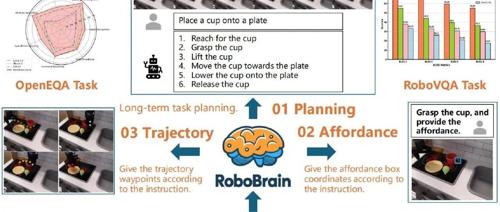
智源发布RoboBrain融合多模态大模型与具身智能技术,成功解决机器人操作任务难题,并已录用于CVPR2025。课程内容涵盖ML机器人基础知识、数据集特性及RoboBrain模型结构等,提供1v1论文指导服务。
上海交大位列第一,登榜不足百人,这期世界科学智能大赛解读来了!

学习解读第三届世界科学智能大赛。黄仁勋提出大语言模型、具身智能、AI4S是关键方向。新增全球规模最大的AI4S赛事。理解AI4S赛题:训练“分子画家”AI生成化学结构,加速新药和新材料研发。
英特尔 “芯” 动力,驱动具身智能新征程!
英特尔推出具身智能大小脑融合方案,结合CPU、GPU和NPU异构算力。该方案通过OpenVINO工具包等软件开发套件加速实现多平台部署,助力各行业应用落地。
