CVPR 2025 Highlight|北大联手智元发布首个基于说明书的家电操作评测基准

北京大学联合智元机器人团队提出CheckManual评测框架,专注于研究基于说明书的家电操作。该框架包含1107份不同内容的家电说明书,涵盖2211个可操作部位和1464个操作任务。通过OCR、多模态大模型解析说明文字及视觉信息,提出ManualPlan模型进行详细的操作规划,并实现与家用电器的真实交互。
北京大学联合智元机器人团队提出CheckManual评测框架,专注于研究基于说明书的家电操作。该框架包含1107份不同内容的家电说明书,涵盖2211个可操作部位和1464个操作任务。通过OCR、多模态大模型解析说明文字及视觉信息,提出ManualPlan模型进行详细的操作规划,并实现与家用电器的真实交互。
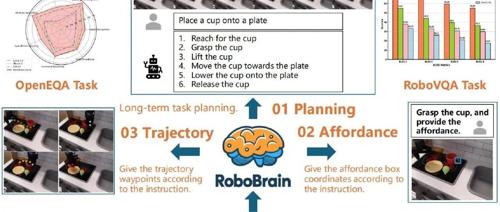
智源发布RoboBrain融合多模态大模型与具身智能技术,成功解决机器人操作任务难题,并已录用于CVPR2025。课程内容涵盖ML机器人基础知识、数据集特性及RoboBrain模型结构等,提供1v1论文指导服务。
三维高斯泼溅技术在几何和纹理边界处存在模糊问题,研究提出BG-Triangle方法结合Bézier三角形的矢量图形特性与高斯概率模型,通过引入不连续感知渲染技术降低物体边界的不确定性,实现更锐利的渲染效果。
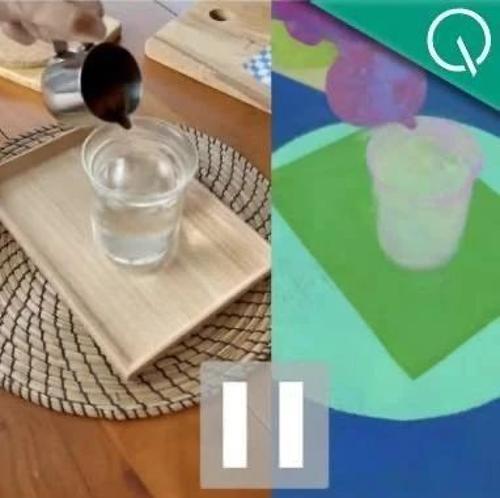
清华大学和哈佛大学的研究团队提出了一种新的方法4D LangSplat,利用视频分割模型生成物体级语言描述,并通过大语言模型提取高质量的句子特征来重建动态语义场。该方法解决了现有静态语义场重建在动态场景中的应用难题,显著提升了时间敏感查询的准确性。
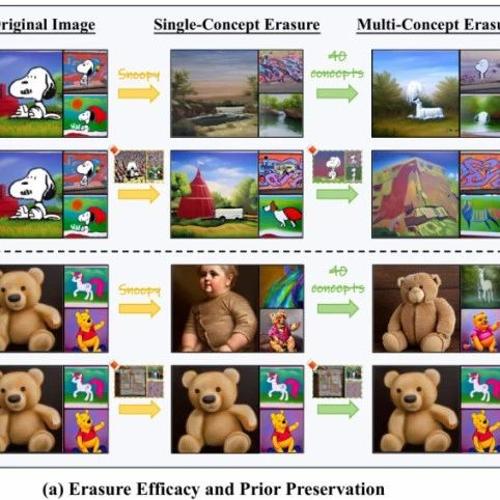
中国科学技术大学联合曼彻斯特大学提出AdaVD方法,通过正交补运算和自适应擦除移位机制实现精准、高效的概念擦除,提升先验保护能力2到10倍。