仅看视频就能copy人类动作,宇树G1分分钟掌握100+,UC伯克利提出机器人训练新方式

UC伯克利团队研发的新系统VideoMimic能够通过视频训练机器人模仿人类动作,已成功让宇树G1机器人学会多种复杂动作。系统利用深度相机和IMU等传感器获取环境信息及机器人姿态,并将这些数据作为策略模型的输入进行实时推理控制。
UC伯克利团队研发的新系统VideoMimic能够通过视频训练机器人模仿人类动作,已成功让宇树G1机器人学会多种复杂动作。系统利用深度相机和IMU等传感器获取环境信息及机器人姿态,并将这些数据作为策略模型的输入进行实时推理控制。
谢赛宁十年前被NeurIPS拒收的论文《Deeply-Supervised Nets》(DSN)今年获AISTATS时间检验奖。该论文提出中间层监督思想,继承并发展了后续作品REPA和U-REPA,对计算机视觉领域产生了深远影响。

阿里通义实验室高层薄列峰离职,加入某互联网大厂担任多模态模型部副总经理。此前,通义实验室已有两位核心负责人鄢志杰和黄非离职。薄列峰曾带领团队开发了通义App上的爆款功能。

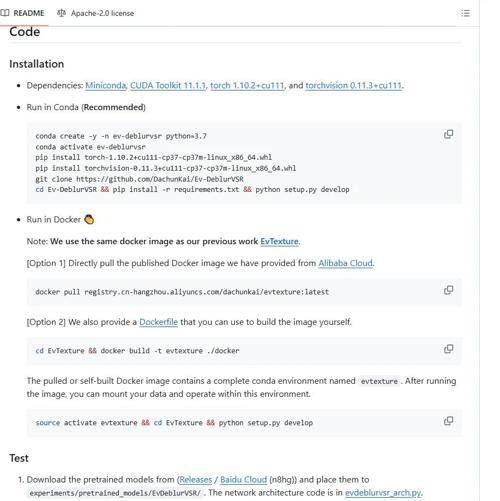
授和张永兵教授团队,创新提出一种分层蒸馏多示例学习框架
HDMIL,旨在快速识别不相关的 patch
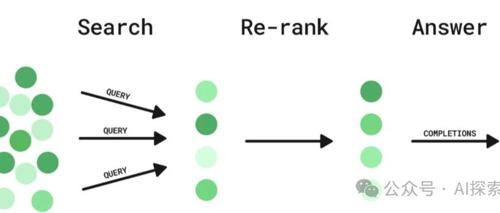
在RAG系统中,Embedding和Rerank模型是核心组成部分。前者将文本转化为低维向量以捕捉语义信息;后者则用于对候选结果进行重排序,提升其相关性。

本文介绍了一种基于深度基础模型的循环双目匹配框架DEFOM-Stereo,该框架利用Depth Anything V2的强大预训练ViT和随机初始化的CNN构建联合编码器,并设计了用于单目视差初始化、尺度更新的方法。实验结果表明,在仿真域到真实域的零样本泛化上以及在线Benchmark中均表现优异。

PyTorch作为深度学习框架之一受到广泛欢迎,本文推荐了一份包含超200个常用函数的PDF手册,并提供视频学习资料,覆盖神经网络训练和设计等内容。