
上海交通大学

3B逆袭7B巨头!Video-XL-Pro登顶长视频理解SOTA,单卡万帧准确率超98%

上海交通大学、北京智源研究院和特伦托大学的研究团队推出了一种新的超长视频理解大模型Video-XL-Pro,该模型通过创新的重构式令牌压缩技术实现了近一万帧视频的单卡处理,并在多个基准测试中超越了此前发布的大型模型。
3B模型逆袭7B巨头!Video-XL-Pro突破长视频理解极限,大海捞针准确率超98%

上海交通大学等团队推出Video-XL-Pro模型,实现近一万帧视频的单卡处理,超过Meta发布的7B模型Apollo-7B。采用重构性token压缩技术显著提升了视频理解效率和质量,并在多个长视频评测基准上超越了同参数量的开源模型。
上交大推出首个AI智能体协议全面综述:从碎片化到互联互通的智能体网络
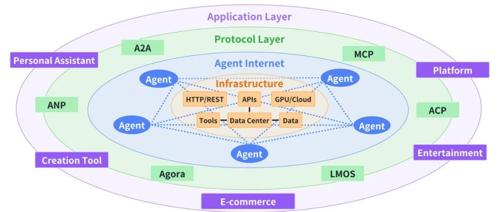
上海交通大学团队发布论文《A Survey of AI Agent Protocols》,提出二维分类体系和七大维度评估框架,旨在解决智能体间协议碎片化问题。该研究通过真实案例分析展示了不同协议在旅行规划中的应用差异,并对未来AI智能体协议的发展进行了展望。
语音领域ISCA Fellow 2025公布:上海交大俞凯、台大李宏毅等三位华人入选
ISCA Fellow 2025揭晓,8位华人学者入选。包括思必驰俞凯、中国台湾大学李宏毅及A*STAR Nancy Chen等多位专家。

顶刊发布上海交大两栖粘附磁驱微型机器人:小尺寸大作用的创新成果
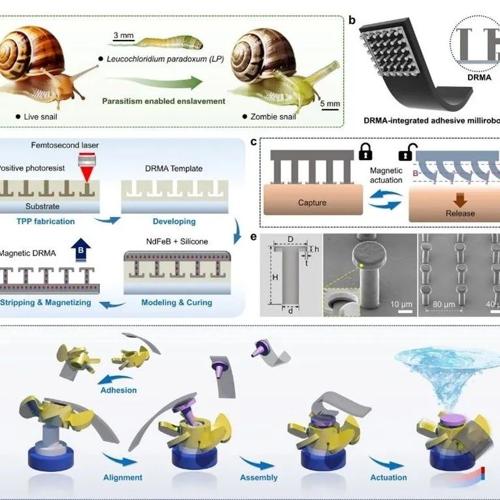
上海交通大学团队开发出一种两栖粘附磁驱微型机器人,能够在空气和水中自如切换并操控多种目标。该研究发表于《Advanced Materials》期刊,提出利用双折返微阵列结构实现可靠粘附力,并展示其在干湿环境中的应用优势及多模态运动控制能力。
AI能看懂图像却算不好距离,上交时间-空间智能基准难倒9大顶尖多模态模型

上海交通大学联合团队发布STI-Bench,评估多模态大模型的空间-时间理解能力。结果显示当前最强模型在自动驾驶和机器人操作任务中表现不佳,准确率低于50%。论文、代码及数据已开源,为改善MLLM空间智能提供了新基准。
